文章目录
- 包装盒都如此迷你。 包装内容一览。除了四轴本身外,有2套3020桨,一份四轴本身的说明书,一份图传说明书,一包附件。 先把说明书留个档。 其中这句话强调多少次都不多,爽飞固然开心,但是安全第一!安全第一!安全第一! 300mw图传,32频道。 3寸桨的长度还不到一张卡。 附件包里有4只备用脚垫,机身上已装有了,脱落损坏的话可以替换。魔术贴。固定螺旋桨用的螺丝9颗,其中1颗备用。S.BUS/PPM接收机线,PWM接收机线,和USB模块及连接线。
- 真的是很小巧可爱,爱不释手。从电调的标示可以看到,最大6A,支持2-3s电池,预刷了BlHeli固件,支持OneShot 125但可惜不支持Active Breaking。机身顶部有接电池的JST接头。图传调频道的拨码开关处顶板也开了对应的孔可直接操作非常方便。图传天线只是普通的线性天线,有套铜管。这种天线就这样从缝里穿出来拉倒的方式感觉不太可靠,很容易受损的感觉。且天线直接和图传焊死,损坏替换会很麻烦。电机是1104 KV4000,才一根手指粗。 显然飞控是两面都有元件,且和分电板二合一的。这其实也是节省空间的关键。 摄像头直接用手掰一个角度就好,非常方便!但……似乎这枚摄像头有点歪?从照片角度看,左边低右边高是怎么回事?根据参数,这是一颗120度广角摄像头,120这样的小广角正好适合FPV。CMOS是肯定的了。 宽的头是接PWM接收机的,相信现在没人用了吧?小的被铝柱挡住的,则是接USB模块,刷固件调参数用的接口。不得不说,这个口挡得真是完美,简直像故意的!这也是我认为此机最大的设计败笔。 焦距没对好,里面三个接口,从左到右:灯带接口,PPM接口,S.BUS接口。支持S.BUS是一大优点!虽然软件本身都是支持的,但是在这么紧凑的机身上能额外做出接口来还是要赞一下。S.BUS和PPM的区别可看这里。 另外电调是用厚双面胶粘在机臂上,其实强度来说已经够了不需要额外扎带什么的。机架整个下底盘是机臂和底盘一体化设计,2mm的厚度对这个级别足够了。在镜头下方还有一片加强。 翻过来肚脐眼上还有一颗蜂鸣器!显然这也是直接集成在了飞控板上的。这种集成度就是自己组装所无法企及的了。注意蜂鸣器上那张贴纸要撕掉。 简单看完外观,来看看很重要的一个因素:重量。官方宣称空机重量仅有区区85克,真的吗? 一激动忘记放上螺旋桨的固定螺丝了。不过可以看出,85g的确所言不虚!这是另一个高集成度带来的巨大好处。自己组同样130级别的小四轴,随便怎么搞100克以上是没跑的。而这种小四轴,”every gram counts”。 因为我之前已经把所有JST插头都换成了XT30,这架小机的JST势必也是要换掉的。因为实在太可爱,迫不及待想要装起来试试,直接从后面塞入一枚我们值得信任X4R-SB接收机,空间刚刚好!使用S.BUS接口(必须的!)。挂上一块800毫安3s电池。先过一下称。 还不到170克!且实际上此机推荐的电池是500毫安的3s,那样总重应该在150克以内! 虽然我很着急想要试飞,不过还是要先配置好接收机通道(我习惯用两段开关来解锁/上锁)。把USB模块插入电脑(系统应该会自动安装驱动,如果失败搜索CH340驱动,这是该模块所使用的芯片),拆掉机身右侧那个挡住接口的铝柱(再次吐槽!),连好线以后在CleanFlight选好COM口即可连接。 我的习惯是先备份一下所有设置,并且记下关键的默认参数,比如PID值。供你参考也供自己备用。 可以看出飞控使用的板子类型是NAZE,固件是CleanFlight 1.12.0版。 原厂设置备份文件也放一份:TL130H1_cleanflight_112_backup_5.22.2016.16.0(CleanFlight界面Backup文件),TL130H1-cleanflight-112-dump(CleanFlight的CLI界面里Dump出来的文件)。 设置好解锁通道,试飞一下。因为几乎只飞手动模式(也就是Rate/Acro模式),所以也先飞手动。第一感受出厂的参数就调教得不错。舵量适中,反应灵敏跟手。随后切到自稳模式也试了一下,注意到一个问题,自稳模式下飞机会逐步的向右漂移,即刚开始的时候自稳是很正常的,在飞的过程中似乎加速度计会产生偏差而逐渐向右偏。此时要不断且逐渐加大向左打杆才能保持悬停,否则就会向右飞出去。并不清楚这是什么原因造成的,猜测可能是震动导致加速度计的误差累计?这种小电机和桨应该是没怎么做过平衡的,飞控的安装也没有任何的减震措施。不过因为几乎不飞自稳模式,这个问题基本上也就准备忽略了。相信绝大多数飞这种小四轴的都是飞手动模式的吧?自稳的玩具四轴飞飞就好。800毫安3s电池下,40%左右油门悬停。室内悬停和简单航线了一番,续航可达10分钟!且下来电机热但不烫手。 初步测试结果满意,那么接下来就开始优化工作。
-
-
- 电调其实已经预刷了BlHeli,但现在已经有更新的14.6固件放出,就一并刷新了。出厂固件1.12.0版本的CleanFlight已经可以使用使用BlHeli Passthrough功能,即不必再使用Arduino来给电调刷固件和调参,可直接使用飞控当编程器了!不然在这个机子上想要刷电调简直是个噩梦啊。
- 适逢BetaFlight大版本更新到2.8.1 RC1。正好尝试一下。刷新没有任何的问题,下载针对NAZE编译的固件,选择Full chip erase和Manual baud rate 256000即可。 刷新后会恢复BF的默认设置,注意2.8开始BF在SuperExpo上做了大幅改动,带来更细腻丝滑的手感,同时RC Rate和Pitch Rate/Roll Rate上的设置方式也相应需要有变化不能照搬之前的设置,具体可以参考BF的更新日志。首先因为只飞手动模式无需自稳模式,可以把loop time循环时间降低到500us,这样可以在F1的飞控上也达到2000hz的刷新率!保持所有其他不必要的功能在关闭状态。设置好接收机使用S.BUS,解锁和AirMode的通道。恢复原厂的PID设置。其他基本都保持默认就好。最后一定记得在CLI里检查一下任务列表是否没有不必要的任务在跑,以及CPU的占用率。我的状况如下: # tasks Task list: 0 - (SYSTEM) max: 4us, avg: 0us, rate: 9hz, total: 0ms 1 - (GYRO/PID) max: 476us, avg: 278us, rate: 1976hz, total: 16sec 4 - (RX) max: 156us, avg: 125us, rate: 49hz, total: 204ms 5 - (SERIAL) max: 320us, avg: 2us, rate: 99hz, total: 68ms 6 - (BATTERY) max: 78us, avg: 1us, rate: 49hz, total: 10ms 7 - (BEEPER) max: 7us, avg: 0us, rate: 98hz, total: 4ms # status System Uptime: 29 seconds, Voltage: 7 * 0.1V (1S battery - NOT PRESENT), CPU:5% CPU Clock=72MHz, GYRO=MPU6050 Cycle Time: 505, I2C Errors: 0, config size: 1276 可以看到只有必须的任务在运行,CPU占用也非常低,2k刷新率可以安心跑。 一个有注意到的地方是,电调是宣称支持OneShot 125的,但是在出厂CF固件里并没有打开对OneShot 125的支持。不清楚厂家是出于什么考虑没有打开,还是只是忘了-_-b。手动点上OneShot 125,保存重启,竟然出现个有点搞笑的问题,四个电机会抽筋般的,随机每个转那么很短暂的一下,停几秒,又短暂转一下,如此往复。刷最新版的CF/BF和BlHeli固件问题依旧。后来发现解决的办法其实也简单,到BlHeliSuite里,把PPM Min Throttle调高一些即可。我是调到了1048。难道是因为这个问题才没有默认启用?
- 这个东西具体说的话稍有点复杂,有兴趣可以google下具体了解,或者看看这篇文章。 在当前最新版BF和BlHeli搭配时一个相对简单不追求100%完美的方式是: 移除所有螺旋桨!到Motor页里,慢慢拉动Master往上走,找到可以让4个电机都可以稳定转动的最小值。 到Configuration里,把步骤1里的最小值加上10左右,填入最小油门里。我用的是1170。 Configuration里把最高油门设置到1970/1980左右。 到Motor里对电调做一次油门行程校准。 返回Configuration里把最高油门设置到2000。注意以后不要再做行程校准,否则要返回步骤3。 进入BlHeliSuite,查看每个电调的行程是否一致。有时可能会有细小差别,这时可手动统一PPM Max Throttle为4个电调里最低的那个值。 这样基本上可以用满油门的全部行程和最大分辨率。贴一下我的截图供参考。 完了以后可以把Programming by TX的勾去掉以免以后不小心重新校准了行程。
-
- 发现机身有个别螺丝并没有上紧。务必检查拧紧每一刻螺丝。
- 摄像头是用双面胶粘在上板上的,有点歪的问题,掰下来,重新用3M双面胶小心粘好即可。
- 接收机的改动需要一点点胆大心细,当然你也可以就像上图那样塞着用,舵机插头插在S.BUS脚上用即可。我觉得那样看起来不够干净,且我还是喜欢电压回传到我的X9D+上。小机飞远了蜂鸣器的滴滴叫可能会听不到。 手术台上的X4R-SB。 先去除针脚。我的方式是先用钳子轮流在各边一点一点的把黑色塑料部分剥下来。 这个过程不要着急不要用蛮力。各边一点一点的来,最终可以一整块拿下。 然后针脚都单独分离了就很简单了,用电烙铁一个一个针脚焊下来即可。 拆焊的时候不要太用力,不然会悲剧,仔细看图,我的S.BUS信号脚就有一条走线被带下来了T.T。好在焊回去测试了下没断。 取接收机的接线,量好长度,剪掉舵机头以后直接焊上接收机。这部分其实就已经完成了。去掉针脚直接焊又减轻了重量又减少了突出机身的面积。也不必担心插针的接触不良/脱落等问题了。 接下来是电压回传问题。机身自己有蜂鸣器是没错,但X9D+和X4R-SB既然有回传功能没有理由不去用它。回传有两种方式: 配置飞控里的Telemetry 飞控将电压信息发送给接收机,由接收机发回给遥控器。缺点是首先需要在飞控板上额外引出一条线到接收机,其次因为F1的飞控只有2个串行接口且都被使用了(一个USB,一个S.BUS接收机),要用回传还需要启用软串口,这会给CPU带来额外的计算负担。在F1板+2k刷新率下,我希望CPU能尽量少忙些事。 直接使用接收机的模拟输入口 这个方式其实在之前一篇文章里已有说过。我们可以选择用一个FrSky的分压模块直接读取电池电压,或者DIY一个小模块来读取。这个方式无论软件还是硬件上都不用动飞控一根手指头,是此机上比较理想的方式。 然而之前是用普通的元件DIY的,在这家小机上出于体积和重量的考虑,我用了贴片元件来做。 重新贴一下电路图,对这个还不清楚的建议先看一下原文。 三个电阻串联焊好,4.7uf的电容焊在了中间那颗3.3K电阻的背面与它并联。 焊好4根引线。其中两根接电池正负极,两根接接收机的模拟输入口。 用一块3M双面胶把这个“模块”固定在接收机上,电压检测的线直接焊在了模拟输入口A1的背面针脚上,这样连小接头也省了。负极的话,A1旁边那个负极针脚太小又夹在中间,为了焊接安全,我把负极焊在了一个舵机口的负极上。 电池端比较好办,直接焊在图示位置的电调引脚上。 包上热缩管,贴一块双面胶就可干净利落固定在机架尾部,且有回传电压啦!~
-
- BetaFlight 2.8.1 的确是有明显不同的丝滑手感。TL130H1的表现也令人满意,静如处子、动如脱兔。小空间的穿越,大幅度的快速翻滚都毫无问题。更小的体积和更轻的重量飞起来心理压力都小了。CMOS摄像头在光照充足的条件下也表现不错。整个儿试飞非常愉快!满油门爬升有抖动,可能因为刷新率调到了2K,PID还需要微调(原厂CF固件设置的刷新率是1K),或者开一点TPA。要说不足的话,玩到后面天色暗一点以后,CMOS摄像头的宽容度短板就暴露了出来,明暗对比强烈的画面里暗处几乎是一片黑看不清了。以及几次小炸鸡以后,天线成这样了。
- 整体上我很喜欢这个小家伙。干净整洁颜值高。各部件搭配均衡,性能上也一点也不差。麻雀虽小五脏俱全。摄像头角度可调,OneShot 125加持的BlHeli电调,300mw图传等都让它在功能上也不输大的穿越机。而更迷你的体积更轻的重量让它对场地的适应性更强。相对来说危险性也较低(最安全/最危险的仍然是你自己!)。综合各种因素,我个人认为它可以作为一台理想的练习机。我自己应该会更多地飞它,只有在想带Runcam录像的时候才飞大四轴了。
一直以来都想攒一枚轴距150或者更小的四轴。手里的QAV 280虽然没什么大问题,但毕竟大且重,相对较危险而不能随便找个地方就玩。小的呢其实组起来也是不容易的,局促的空间里要合理又有效的安排进所有的东西是个挑战。正在四处留心着小四轴的配件时突然看到了这枚TL130H1,眼前一亮!

先抛开这种硬憋出来的满屏的“亮点”不说,看看东西本身。130轴距,非常小巧。上板位置低,利于重心下移。摄像头角度可调。自带300mw图传。整体看起来干净利落。加上接收机装上电池就能飞。几乎就是理想中的130小机,心一横就入手了。

包装盒都如此迷你。

包装内容一览。除了四轴本身外,有2套3020桨,一份四轴本身的说明书,一份图传说明书,一包附件。
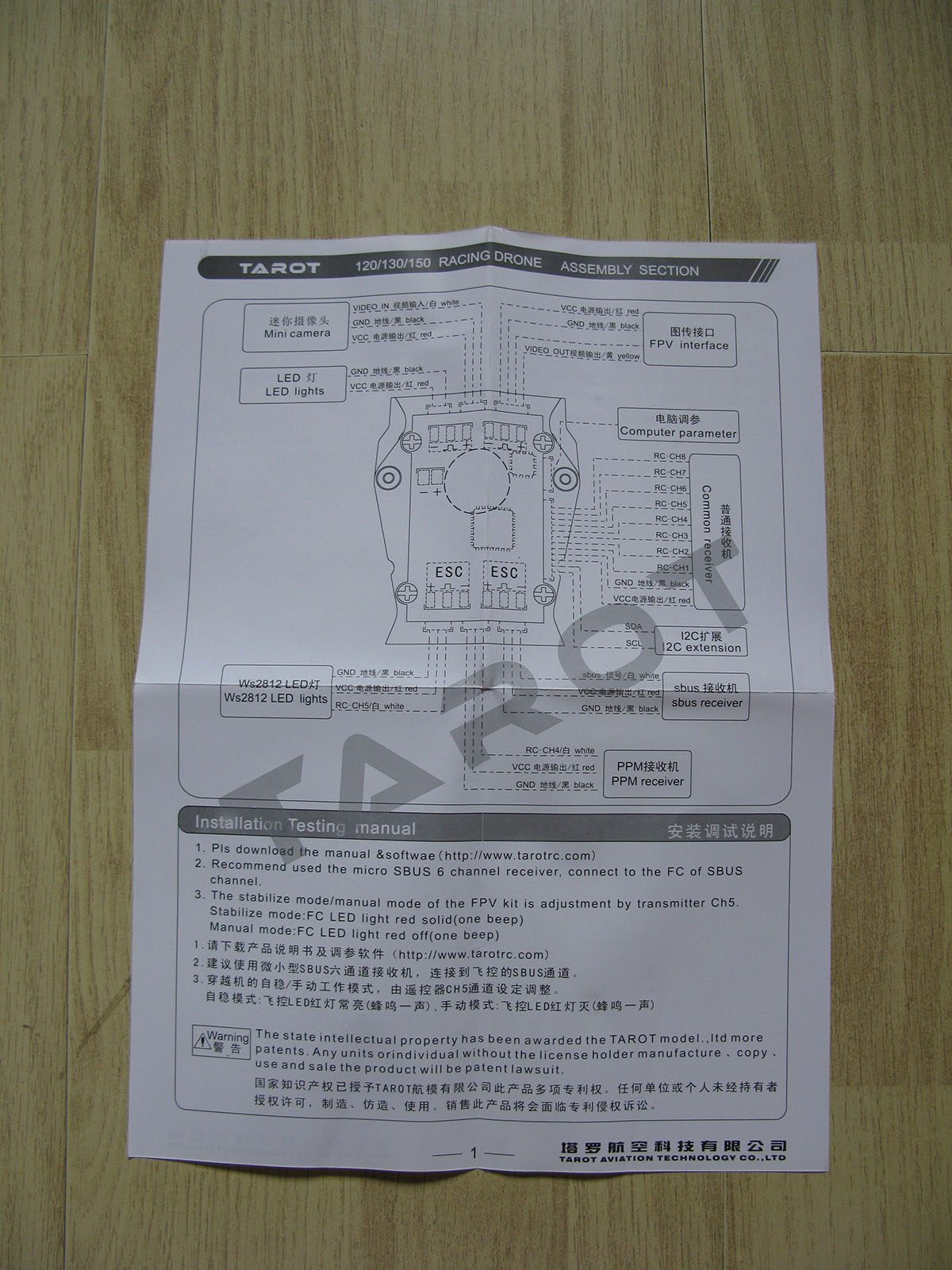
先把说明书留个档。

其中这句话强调多少次都不多,爽飞固然开心,但是安全第一!安全第一!安全第一!
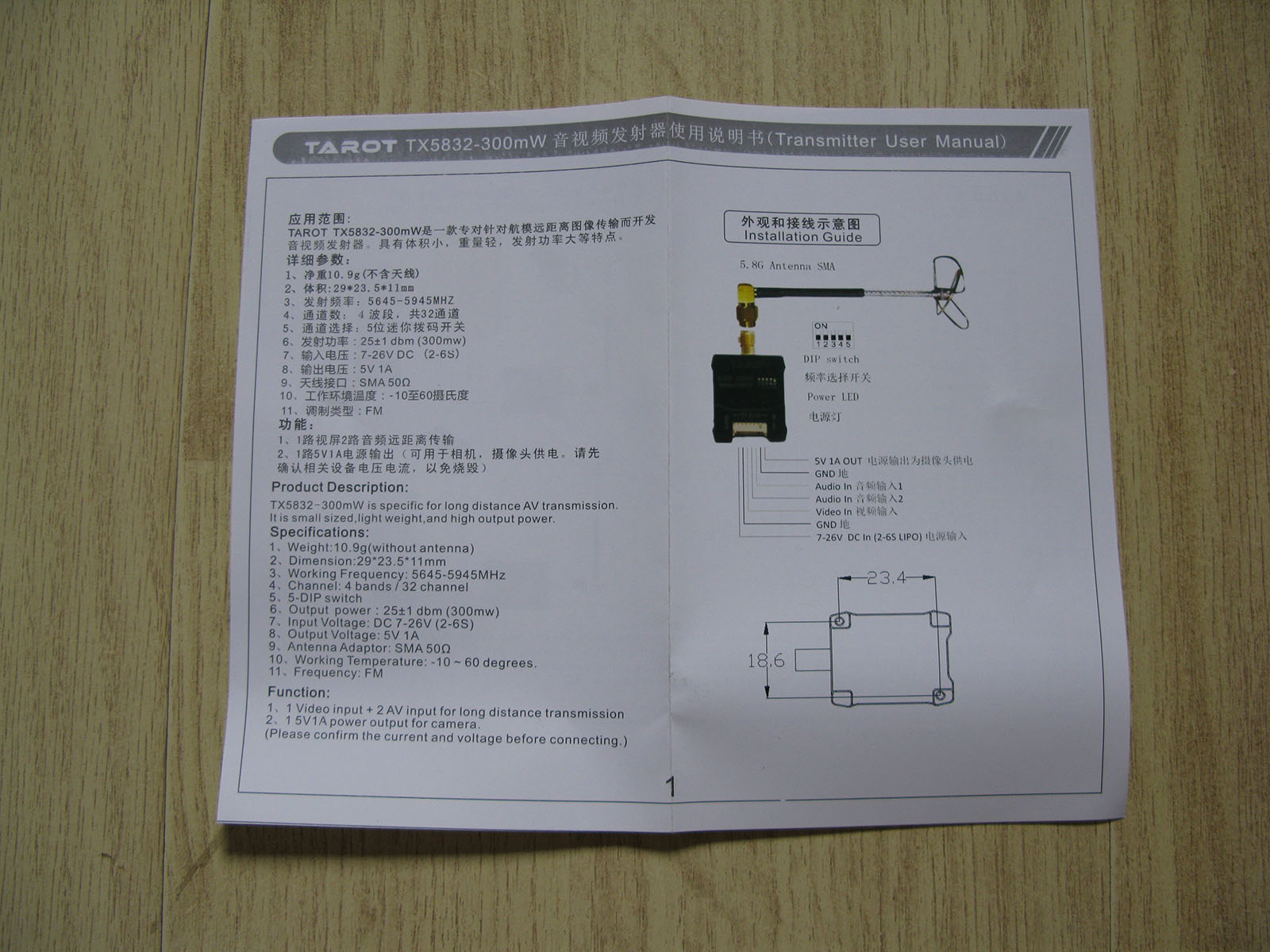
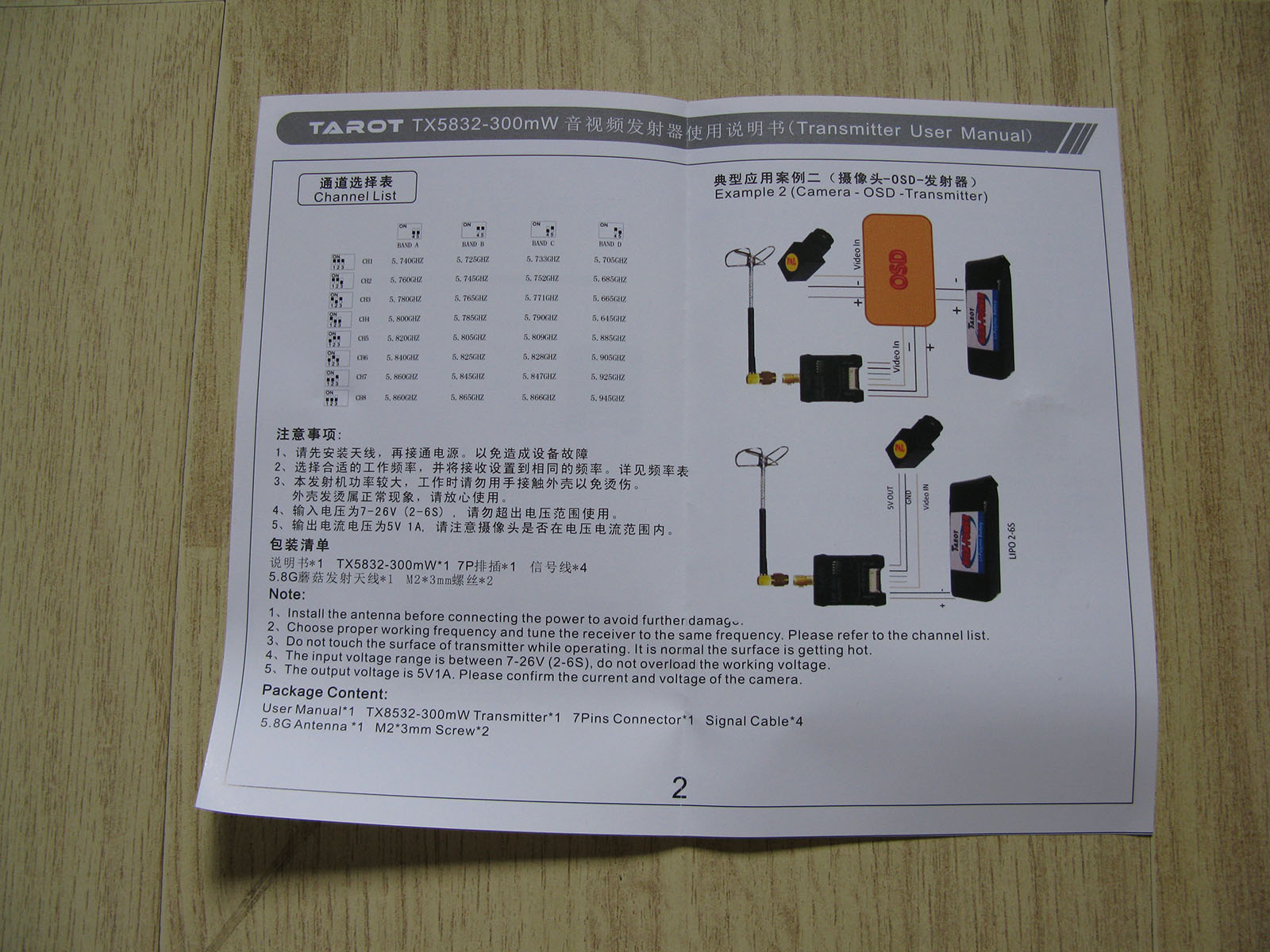
300mw图传,32频道。

3寸桨的长度还不到一张卡。

附件包里有4只备用脚垫,机身上已装有了,脱落损坏的话可以替换。魔术贴。固定螺旋桨用的螺丝9颗,其中1颗备用。S.BUS/PPM接收机线,PWM接收机线,和USB模块及连接线。

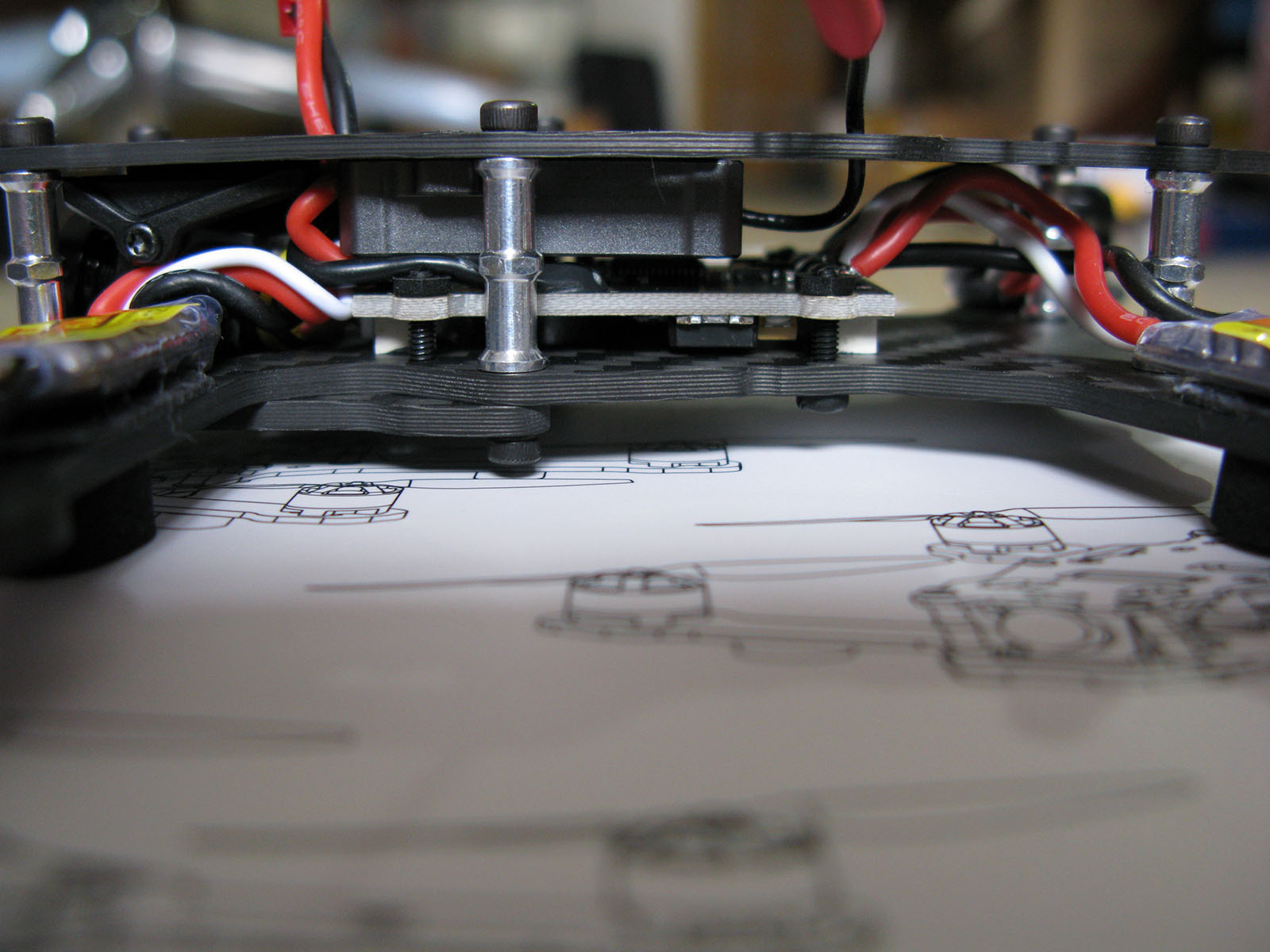
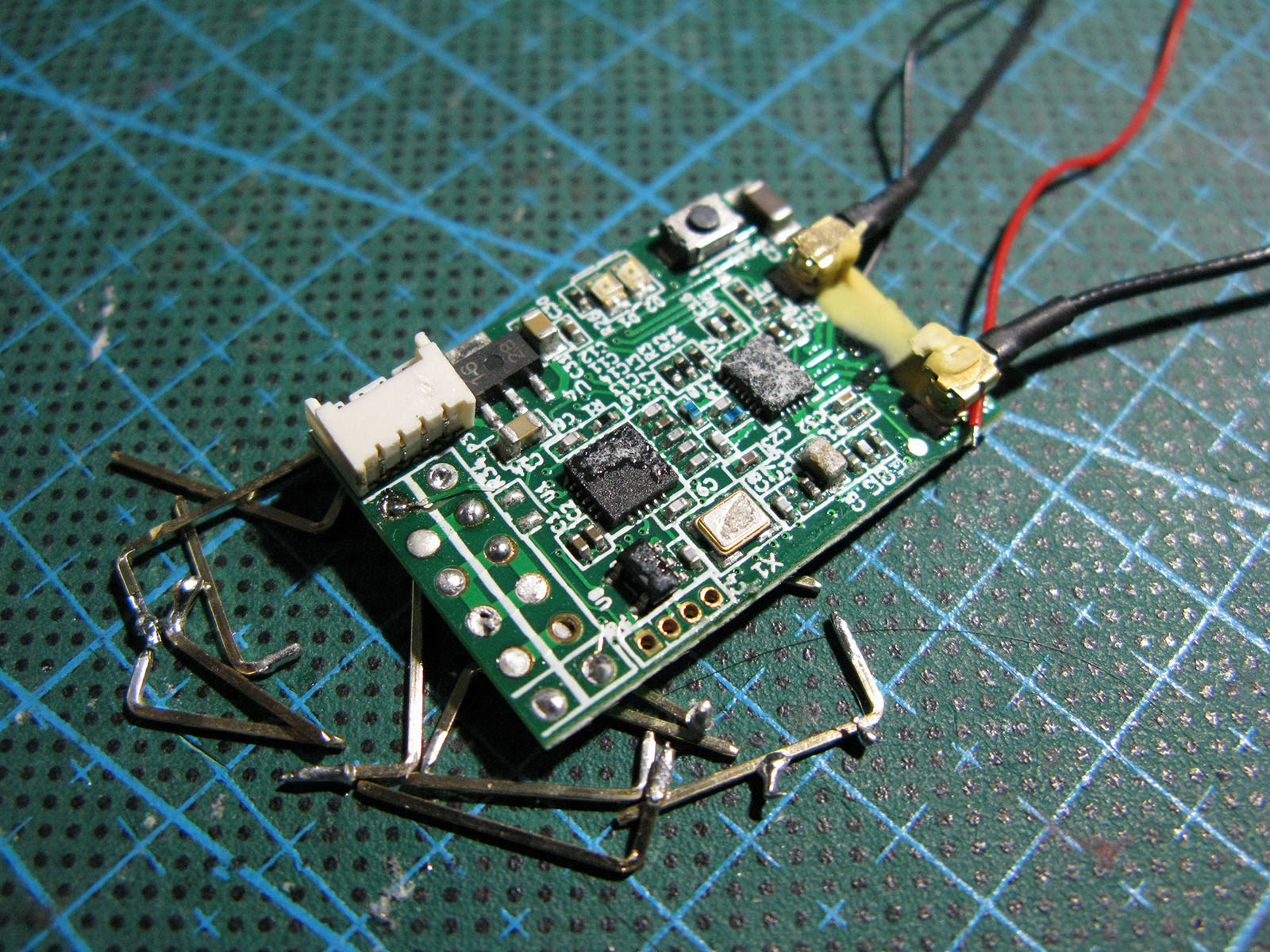
真的是很小巧可爱,爱不释手。从电调的标示可以看到,最大6A,支持2-3s电池,预刷了BlHeli固件,支持OneShot 125但可惜不支持Active Breaking。机身顶部有接电池的JST接头。图传调频道的拨码开关处顶板也开了对应的孔可直接操作非常方便。图传天线只是普通的线性天线,有套铜管。这种天线就这样从缝里穿出来拉倒的方式感觉不太可靠,很容易受损的感觉。且天线直接和图传焊死,损坏替换会很麻烦。电机是1104 KV4000,才一根手指粗。
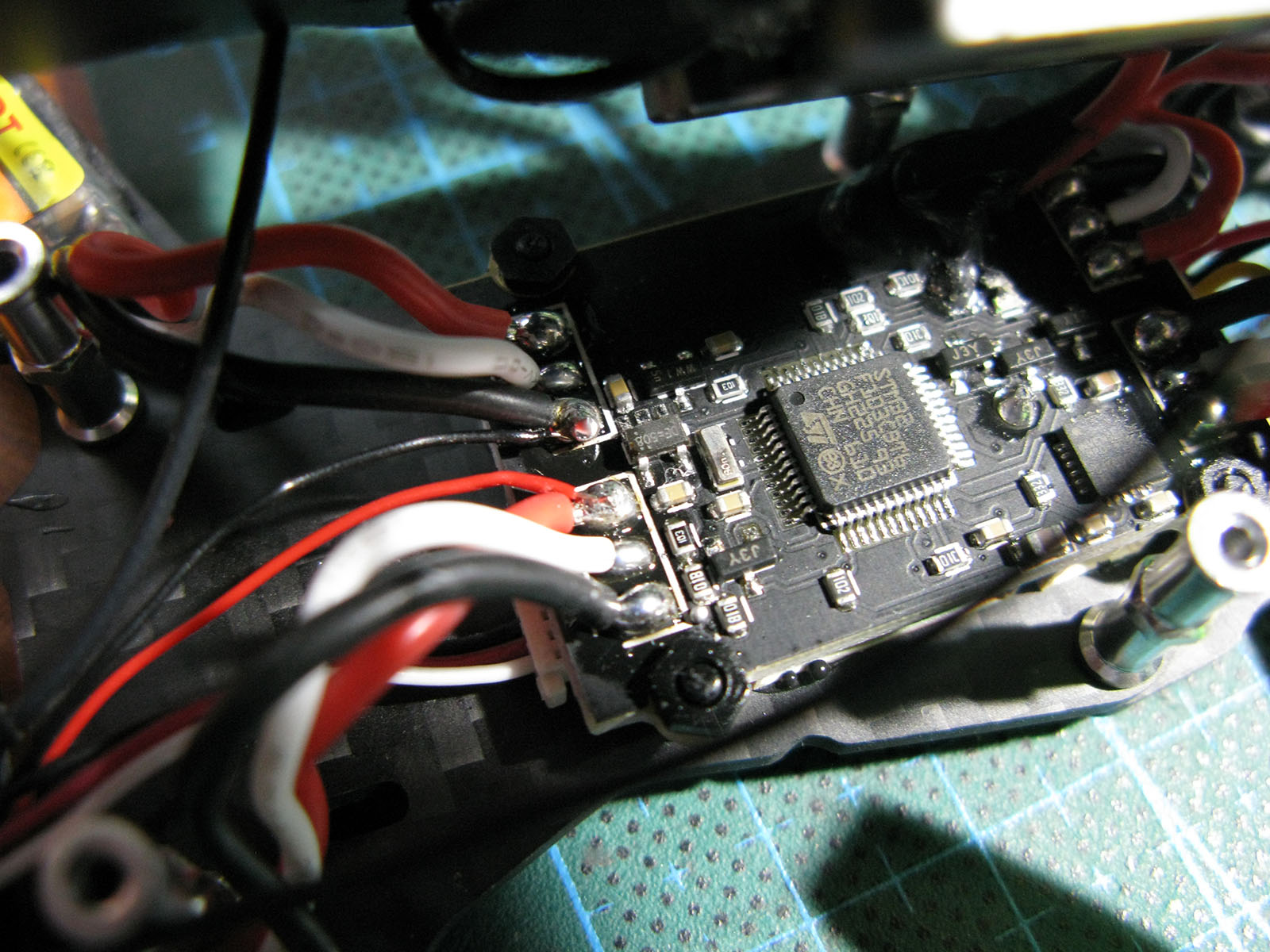
显然飞控是两面都有元件,且和分电板二合一的。这其实也是节省空间的关键。

摄像头直接用手掰一个角度就好,非常方便!但……似乎这枚摄像头有点歪?从照片角度看,左边低右边高是怎么回事?根据参数,这是一颗120度广角摄像头,120这样的小广角正好适合FPV。CMOS是肯定的了。
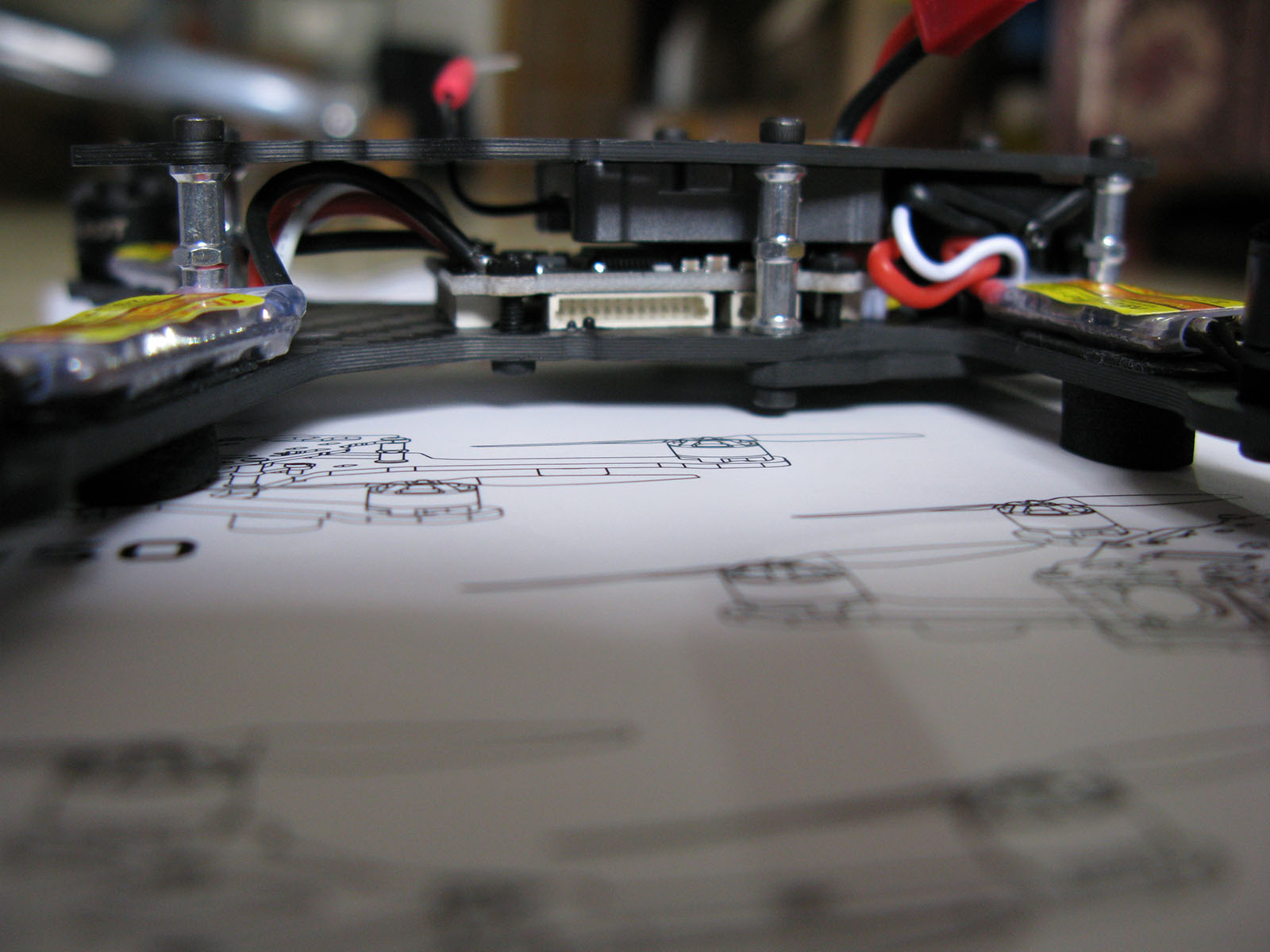
宽的头是接PWM接收机的,相信现在没人用了吧?小的被铝柱挡住的,则是接USB模块,刷固件调参数用的接口。不得不说,这个口挡得真是完美,简直像故意的!这也是我认为此机最大的设计败笔。
焦距没对好,里面三个接口,从左到右:灯带接口,PPM接口,S.BUS接口。支持S.BUS是一大优点!虽然软件本身都是支持的,但是在这么紧凑的机身上能额外做出接口来还是要赞一下。S.BUS和PPM的区别可看这里。
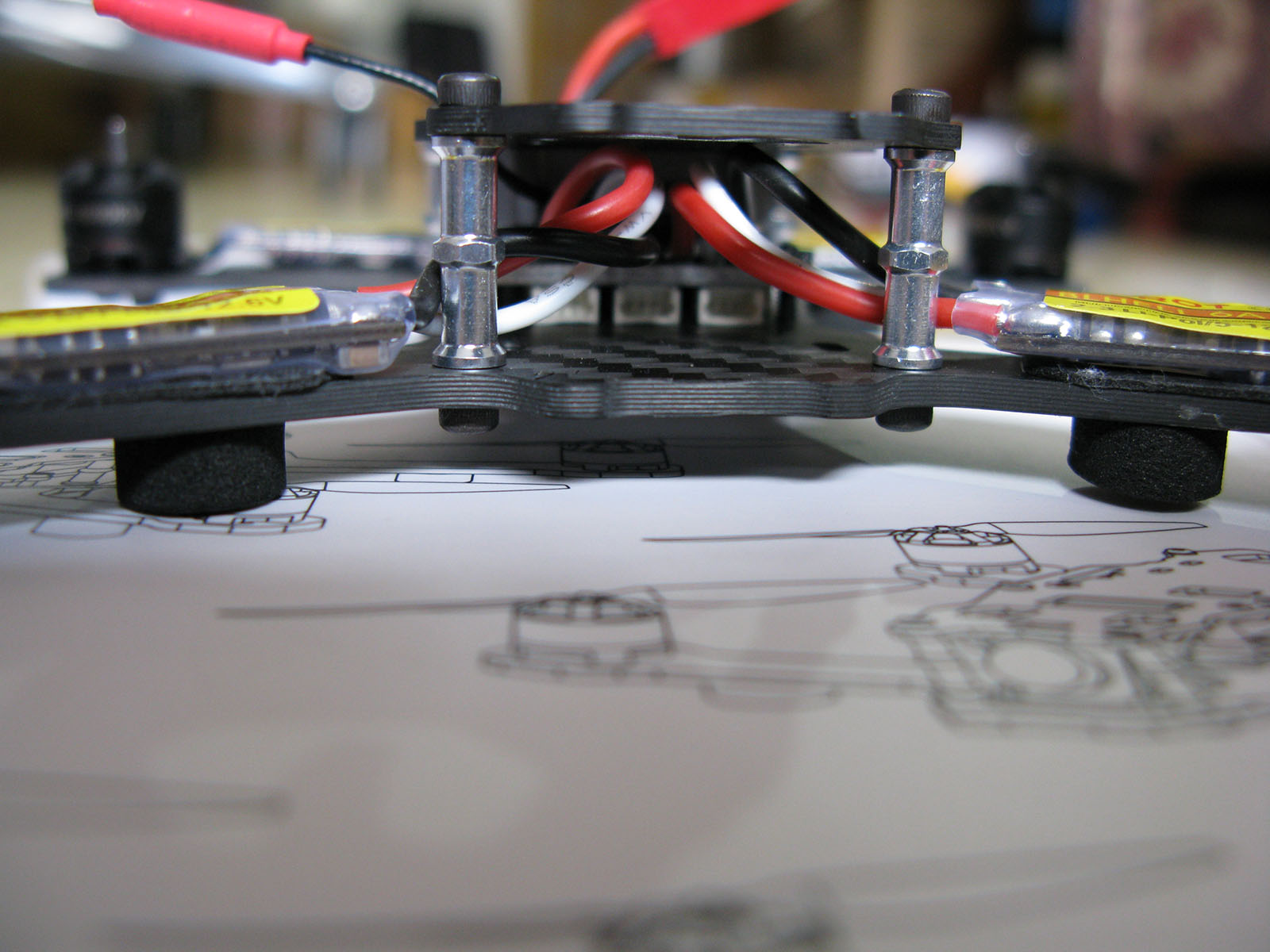
另外电调是用厚双面胶粘在机臂上,其实强度来说已经够了不需要额外扎带什么的。机架整个下底盘是机臂和底盘一体化设计,2mm的厚度对这个级别足够了。在镜头下方还有一片加强。

翻过来肚脐眼上还有一颗蜂鸣器!显然这也是直接集成在了飞控板上的。这种集成度就是自己组装所无法企及的了。注意蜂鸣器上那张贴纸要撕掉。
简单看完外观,来看看很重要的一个因素:重量。官方宣称空机重量仅有区区85克,真的吗?
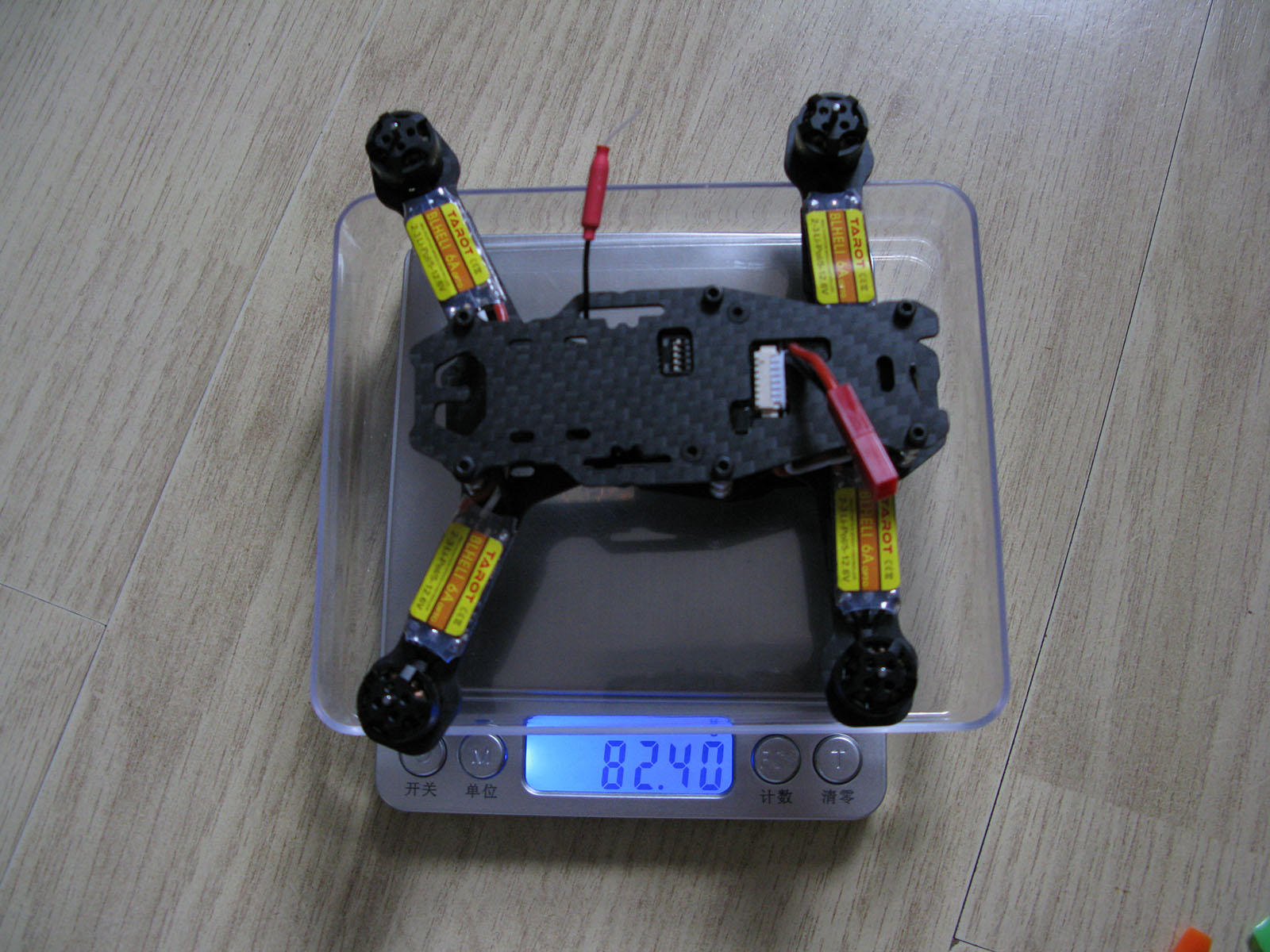

一激动忘记放上螺旋桨的固定螺丝了。不过可以看出,85g的确所言不虚!这是另一个高集成度带来的巨大好处。自己组同样130级别的小四轴,随便怎么搞100克以上是没跑的。而这种小四轴,”every gram counts”。
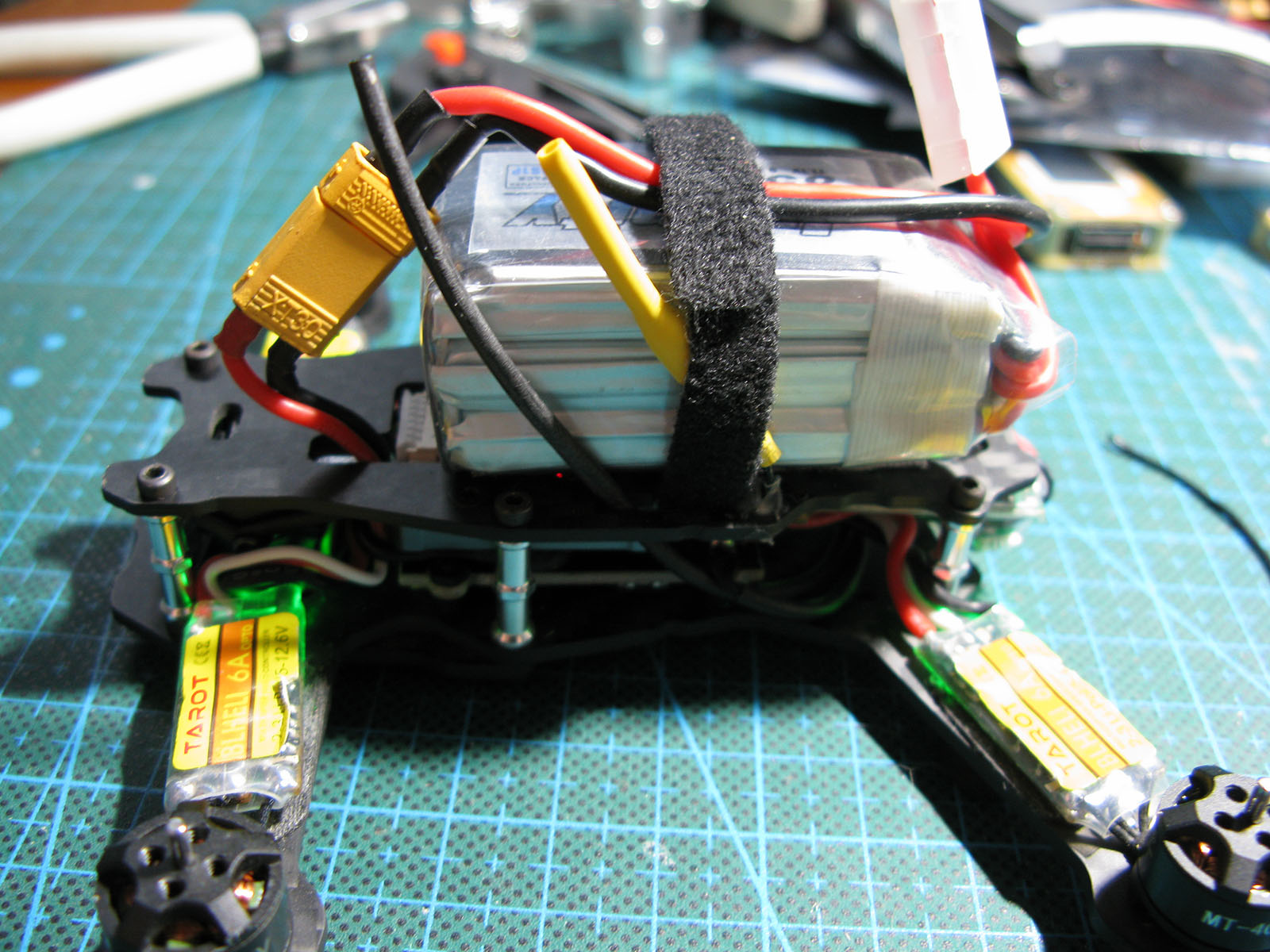
因为我之前已经把所有JST插头都换成了XT30,这架小机的JST势必也是要换掉的。因为实在太可爱,迫不及待想要装起来试试,直接从后面塞入一枚我们值得信任X4R-SB接收机,空间刚刚好!使用S.BUS接口(必须的!)。挂上一块800毫安3s电池。先过一下称。

还不到170克!且实际上此机推荐的电池是500毫安的3s,那样总重应该在150克以内!
虽然我很着急想要试飞,不过还是要先配置好接收机通道(我习惯用两段开关来解锁/上锁)。把USB模块插入电脑(系统应该会自动安装驱动,如果失败搜索CH340驱动,这是该模块所使用的芯片),拆掉机身右侧那个挡住接口的铝柱(再次吐槽!),连好线以后在CleanFlight选好COM口即可连接。
我的习惯是先备份一下所有设置,并且记下关键的默认参数,比如PID值。供你参考也供自己备用。

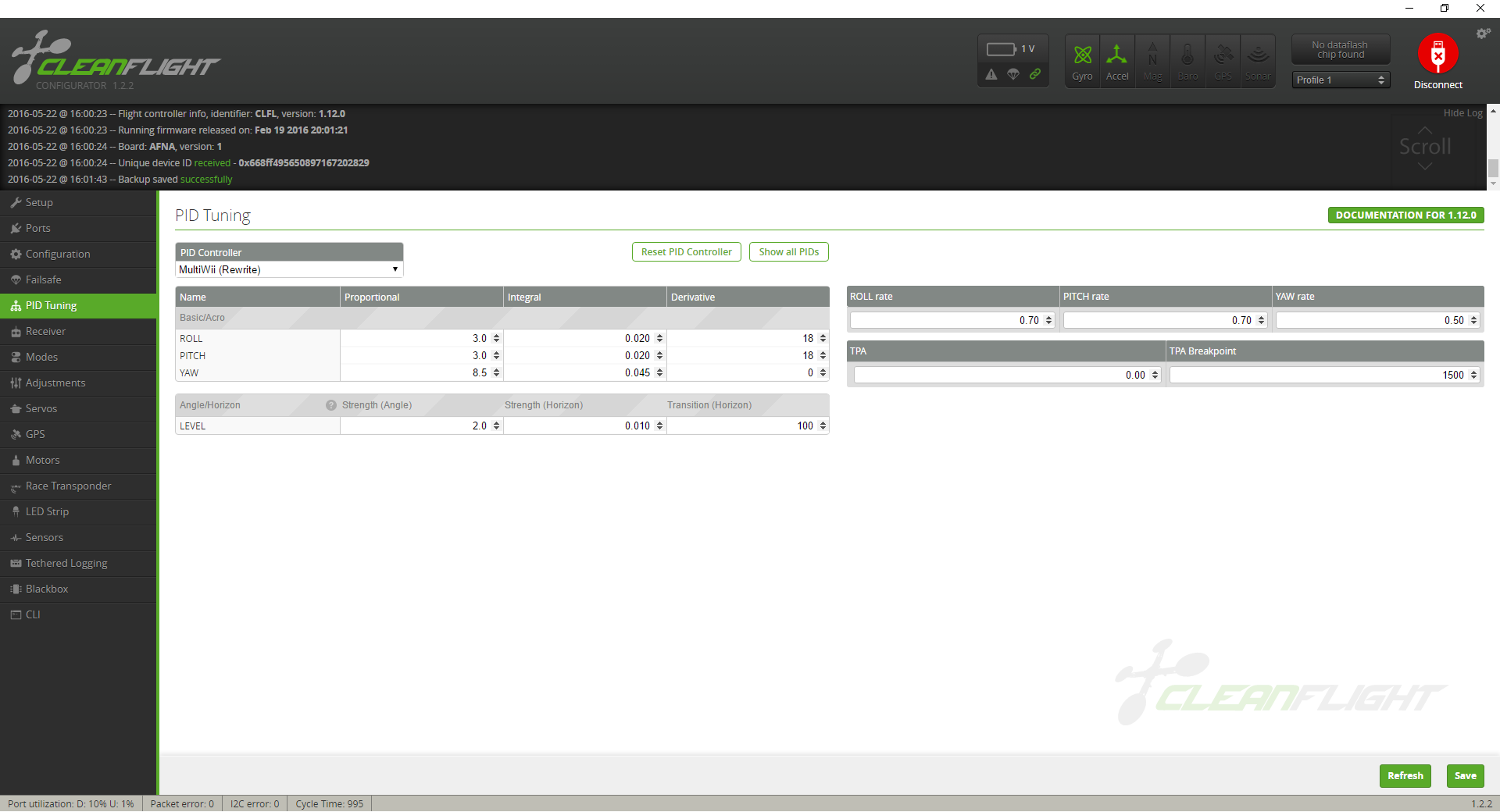
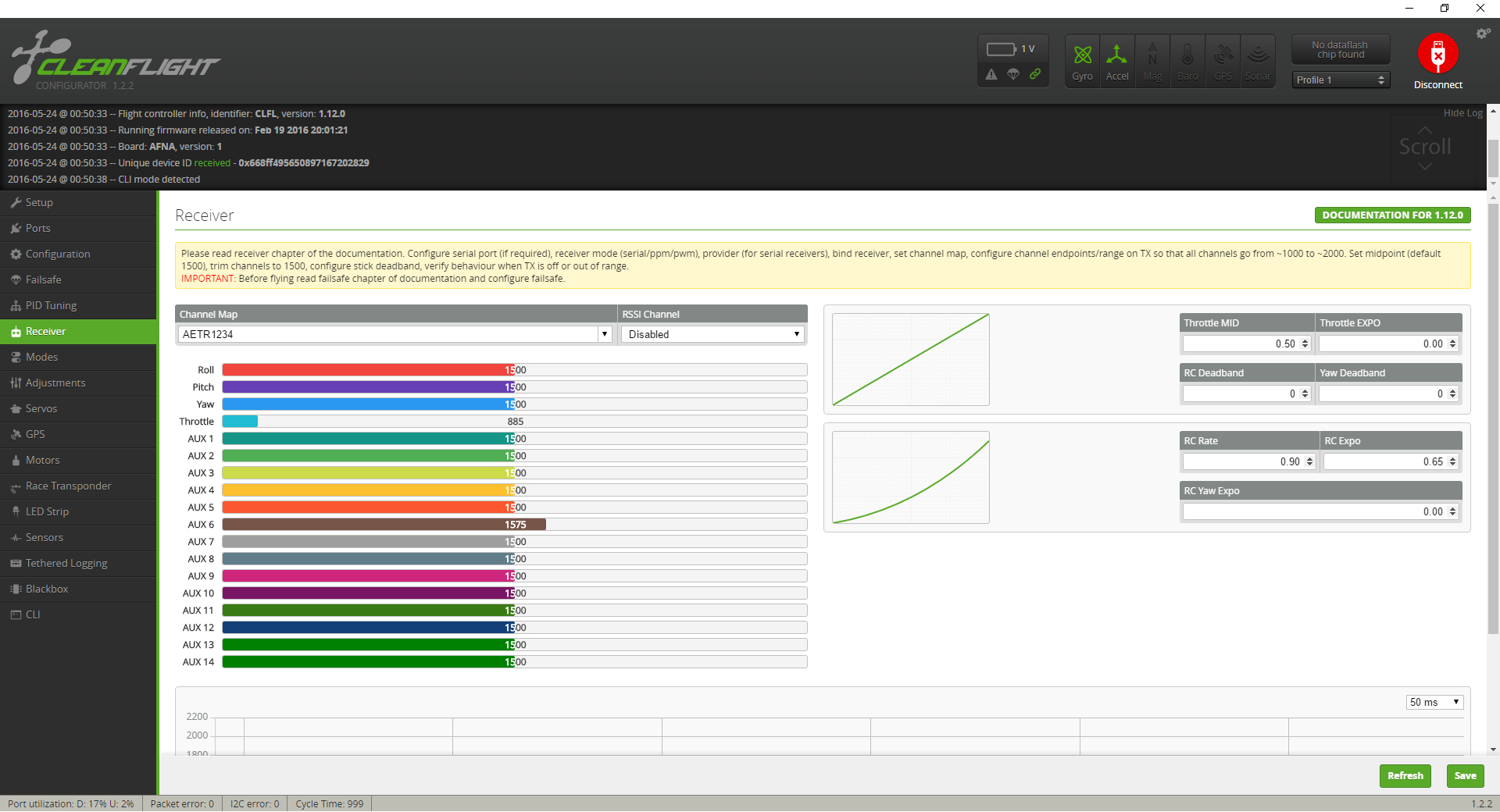
可以看出飞控使用的板子类型是NAZE,固件是CleanFlight 1.12.0版。
原厂设置备份文件也放一份:TL130H1_cleanflight_112_backup_5.22.2016.16.0(CleanFlight界面Backup文件),TL130H1-cleanflight-112-dump(CleanFlight的CLI界面里Dump出来的文件)。
设置好解锁通道,试飞一下。因为几乎只飞手动模式(也就是Rate/Acro模式),所以也先飞手动。第一感受出厂的参数就调教得不错。舵量适中,反应灵敏跟手。随后切到自稳模式也试了一下,注意到一个问题,自稳模式下飞机会逐步的向右漂移,即刚开始的时候自稳是很正常的,在飞的过程中似乎加速度计会产生偏差而逐渐向右偏。此时要不断且逐渐加大向左打杆才能保持悬停,否则就会向右飞出去。并不清楚这是什么原因造成的,猜测可能是震动导致加速度计的误差累计?这种小电机和桨应该是没怎么做过平衡的,飞控的安装也没有任何的减震措施。不过因为几乎不飞自稳模式,这个问题基本上也就准备忽略了。相信绝大多数飞这种小四轴的都是飞手动模式的吧?自稳的玩具四轴飞飞就好。800毫安3s电池下,40%左右油门悬停。室内悬停和简单航线了一番,续航可达10分钟!且下来电机热但不烫手。
初步测试结果满意,那么接下来就开始优化工作。
电调其实已经预刷了BlHeli,但现在已经有更新的14.6固件放出,就一并刷新了。出厂固件1.12.0版本的CleanFlight已经可以使用使用BlHeli Passthrough功能,即不必再使用Arduino来给电调刷固件和调参,可直接使用飞控当编程器了!不然在这个机子上想要刷电调简直是个噩梦啊。
适逢BetaFlight大版本更新到2.8.1 RC1。正好尝试一下。刷新没有任何的问题,下载针对NAZE编译的固件,选择Full chip erase和Manual baud rate 256000即可。
刷新后会恢复BF的默认设置,注意2.8开始BF在SuperExpo上做了大幅改动,带来更细腻丝滑的手感,同时RC Rate和Pitch Rate/Roll Rate上的设置方式也相应需要有变化不能照搬之前的设置,具体可以参考BF的更新日志。首先因为只飞手动模式无需自稳模式,可以把loop time循环时间降低到500us,这样可以在F1的飞控上也达到2000hz的刷新率!保持所有其他不必要的功能在关闭状态。设置好接收机使用S.BUS,解锁和AirMode的通道。恢复原厂的PID设置。其他基本都保持默认就好。最后一定记得在CLI里检查一下任务列表是否没有不必要的任务在跑,以及CPU的占用率。我的状况如下:
# tasks
Task list:
0 - (SYSTEM) max: 4us, avg: 0us, rate: 9hz, total: 0ms
1 - (GYRO/PID) max: 476us, avg: 278us, rate: 1976hz, total: 16sec
4 - (RX) max: 156us, avg: 125us, rate: 49hz, total: 204ms
5 - (SERIAL) max: 320us, avg: 2us, rate: 99hz, total: 68ms
6 - (BATTERY) max: 78us, avg: 1us, rate: 49hz, total: 10ms
7 - (BEEPER) max: 7us, avg: 0us, rate: 98hz, total: 4ms
# status
System Uptime: 29 seconds, Voltage: 7 * 0.1V (1S battery - NOT PRESENT), CPU:5%
CPU Clock=72MHz, GYRO=MPU6050
Cycle Time: 505, I2C Errors: 0, config size: 1276
可以看到只有必须的任务在运行,CPU占用也非常低,2k刷新率可以安心跑。
一个有注意到的地方是,电调是宣称支持OneShot 125的,但是在出厂CF固件里并没有打开对OneShot 125的支持。不清楚厂家是出于什么考虑没有打开,还是只是忘了-_-b。手动点上OneShot 125,保存重启,竟然出现个有点搞笑的问题,四个电机会抽筋般的,随机每个转那么很短暂的一下,停几秒,又短暂转一下,如此往复。刷最新版的CF/BF和BlHeli固件问题依旧。后来发现解决的办法其实也简单,到BlHeliSuite里,把PPM Min Throttle调高一些即可。我是调到了1048。难道是因为这个问题才没有默认启用?
这个东西具体说的话稍有点复杂,有兴趣可以google下具体了解,或者看看这篇文章。
在当前最新版BF和BlHeli搭配时一个相对简单不追求100%完美的方式是:
- 移除所有螺旋桨!到Motor页里,慢慢拉动Master往上走,找到可以让4个电机都可以稳定转动的最小值。
- 到Configuration里,把步骤1里的最小值加上10左右,填入最小油门里。我用的是1170。
- Configuration里把最高油门设置到1970/1980左右。
- 到Motor里对电调做一次油门行程校准。
- 返回Configuration里把最高油门设置到2000。注意以后不要再做行程校准,否则要返回步骤3。
- 进入BlHeliSuite,查看每个电调的行程是否一致。有时可能会有细小差别,这时可手动统一PPM Max Throttle为4个电调里最低的那个值。
这样基本上可以用满油门的全部行程和最大分辨率。贴一下我的截图供参考。
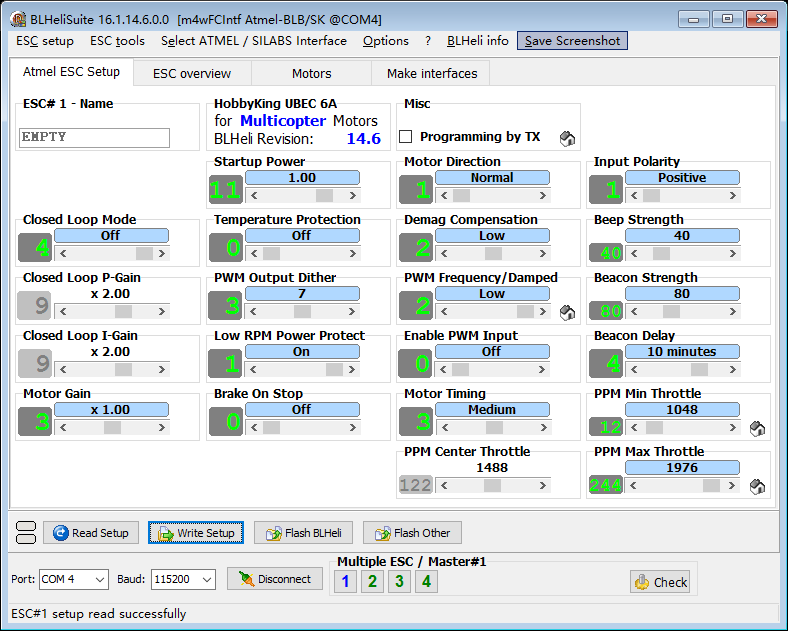
完了以后可以把Programming by TX的勾去掉以免以后不小心重新校准了行程。
发现机身有个别螺丝并没有上紧。务必检查拧紧每一刻螺丝。
摄像头是用双面胶粘在上板上的,有点歪的问题,掰下来,重新用3M双面胶小心粘好即可。
接收机的改动需要一点点胆大心细,当然你也可以就像上图那样塞着用,舵机插头插在S.BUS脚上用即可。我觉得那样看起来不够干净,且我还是喜欢电压回传到我的X9D+上。小机飞远了蜂鸣器的滴滴叫可能会听不到。
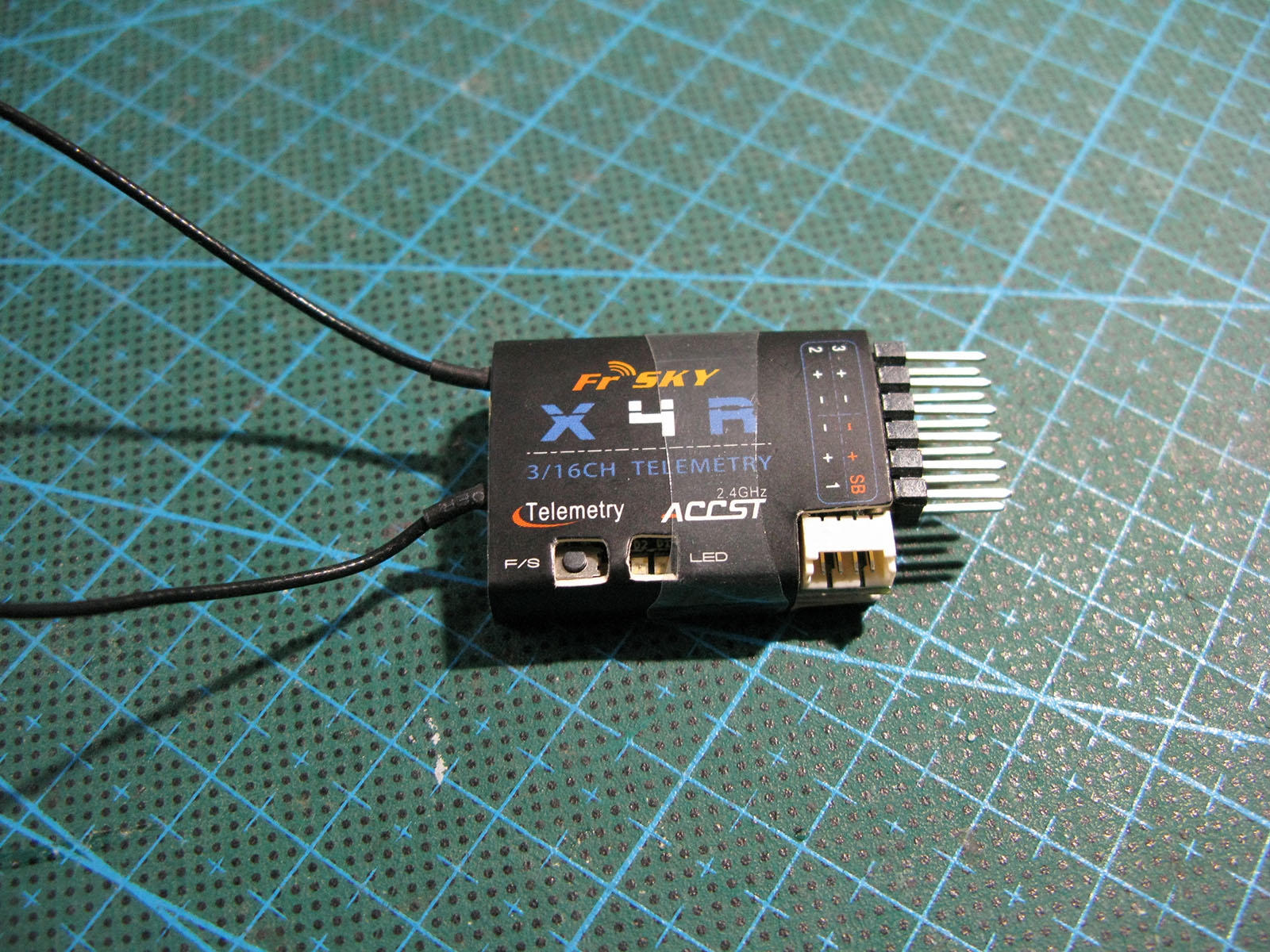
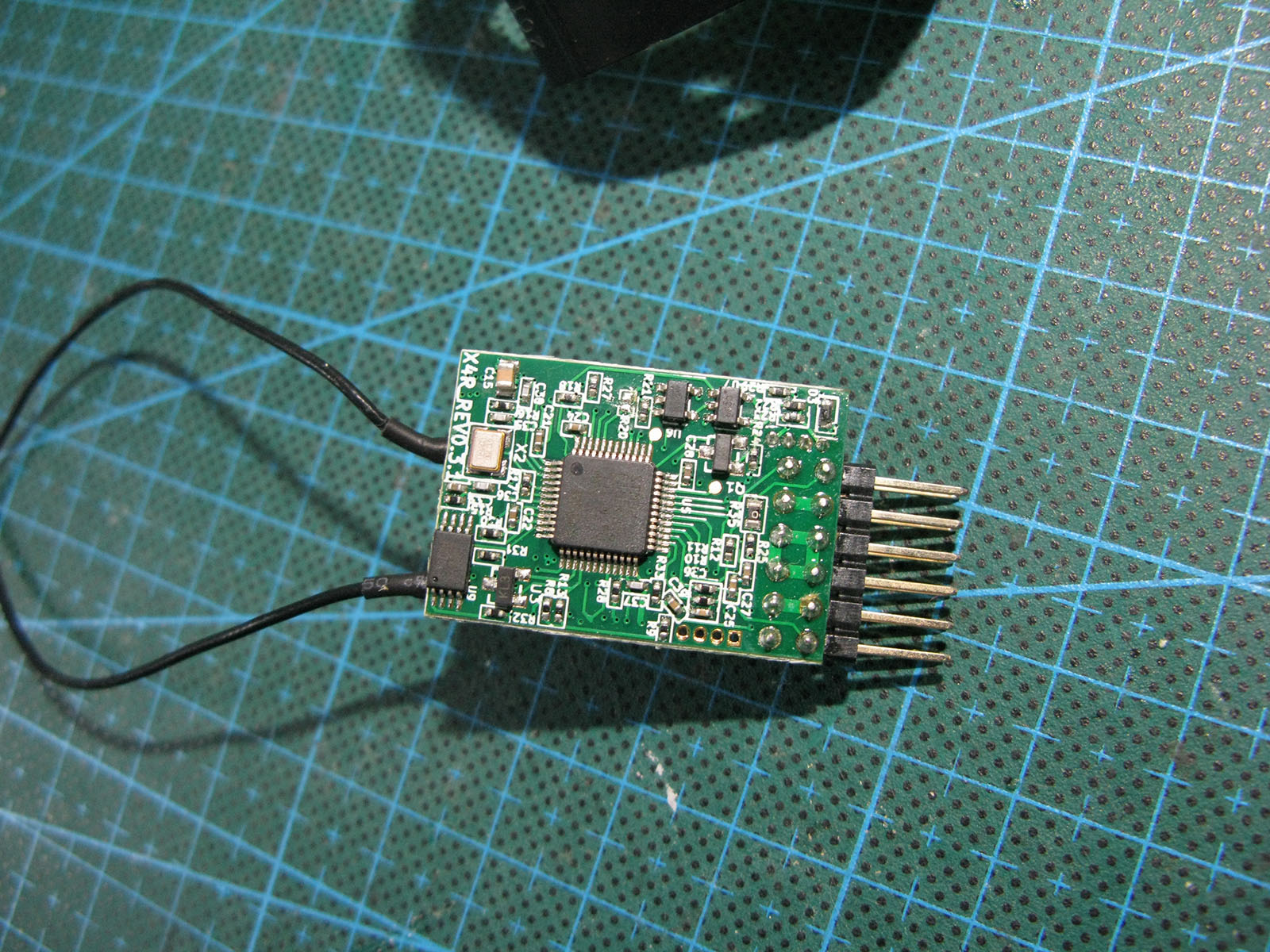
手术台上的X4R-SB。
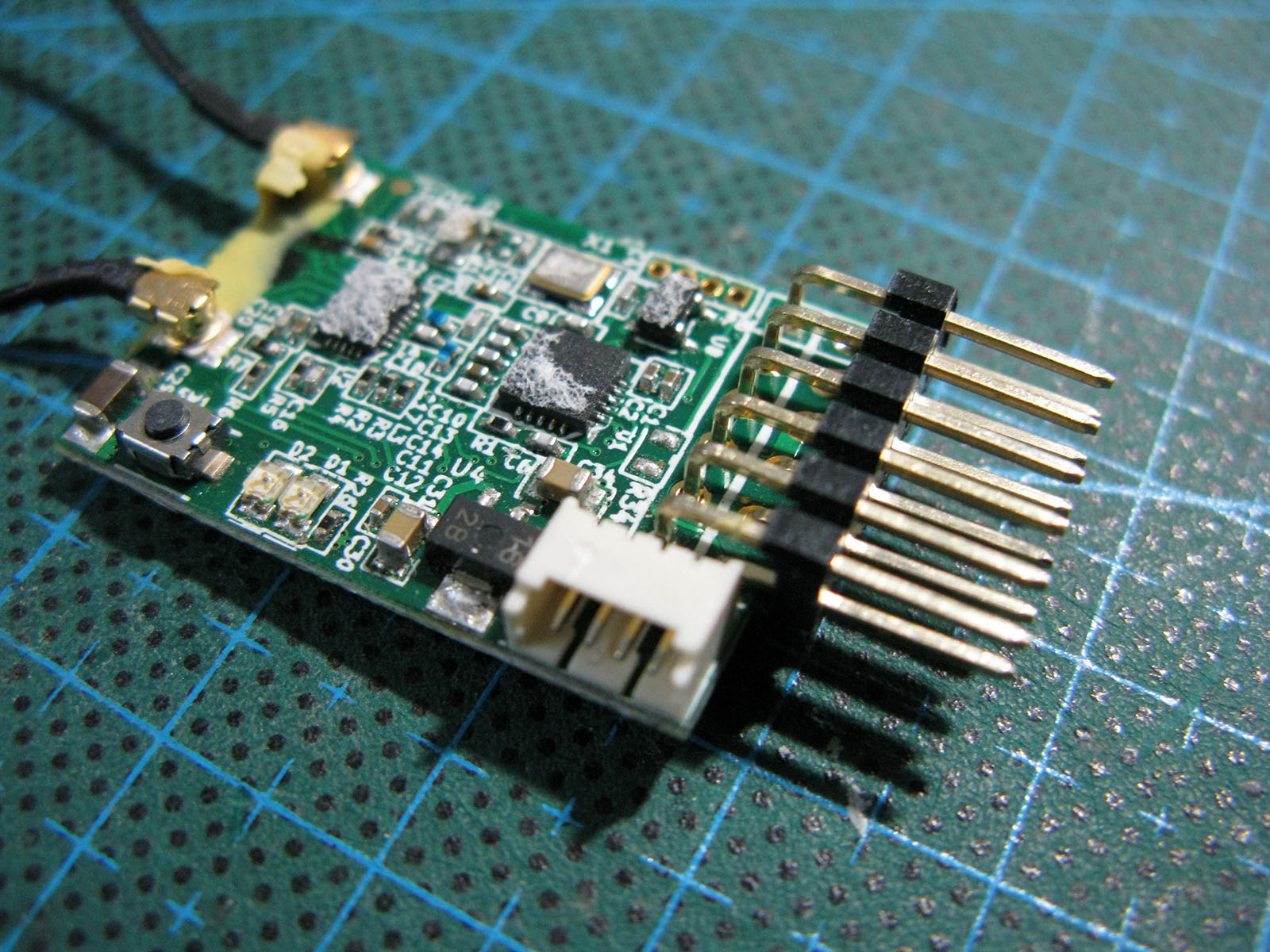
先去除针脚。我的方式是先用钳子轮流在各边一点一点的把黑色塑料部分剥下来。
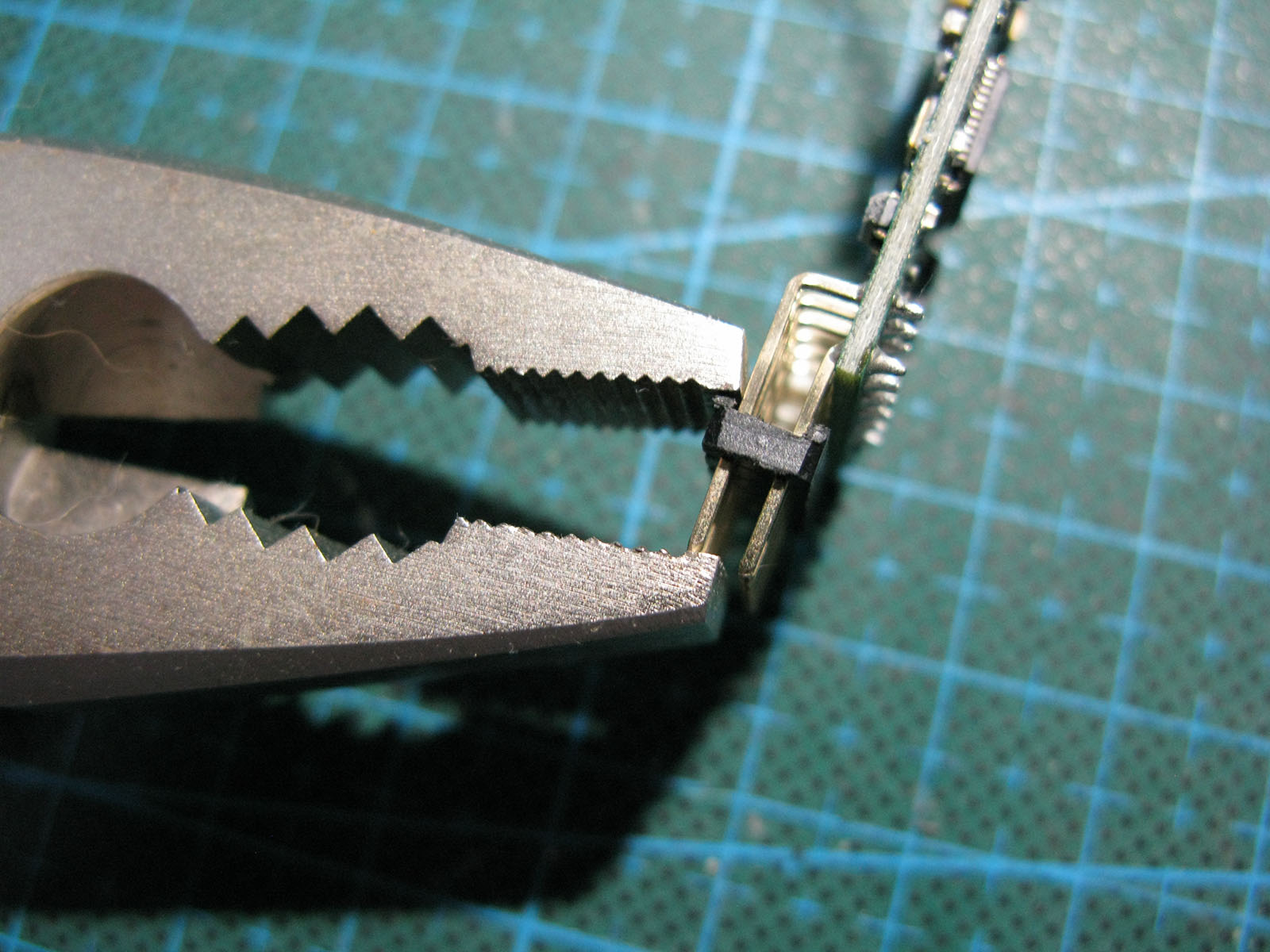
这个过程不要着急不要用蛮力。各边一点一点的来,最终可以一整块拿下。
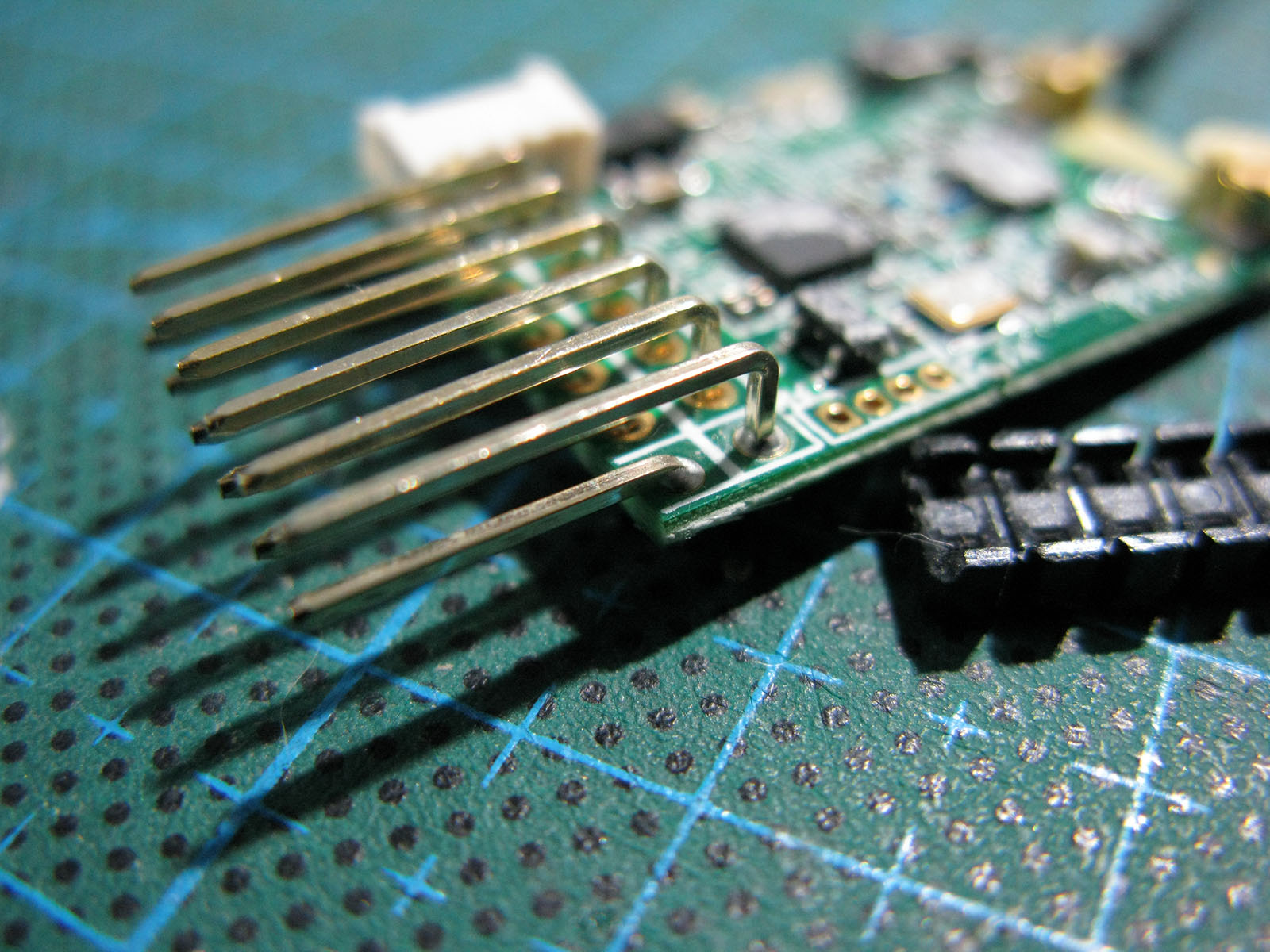
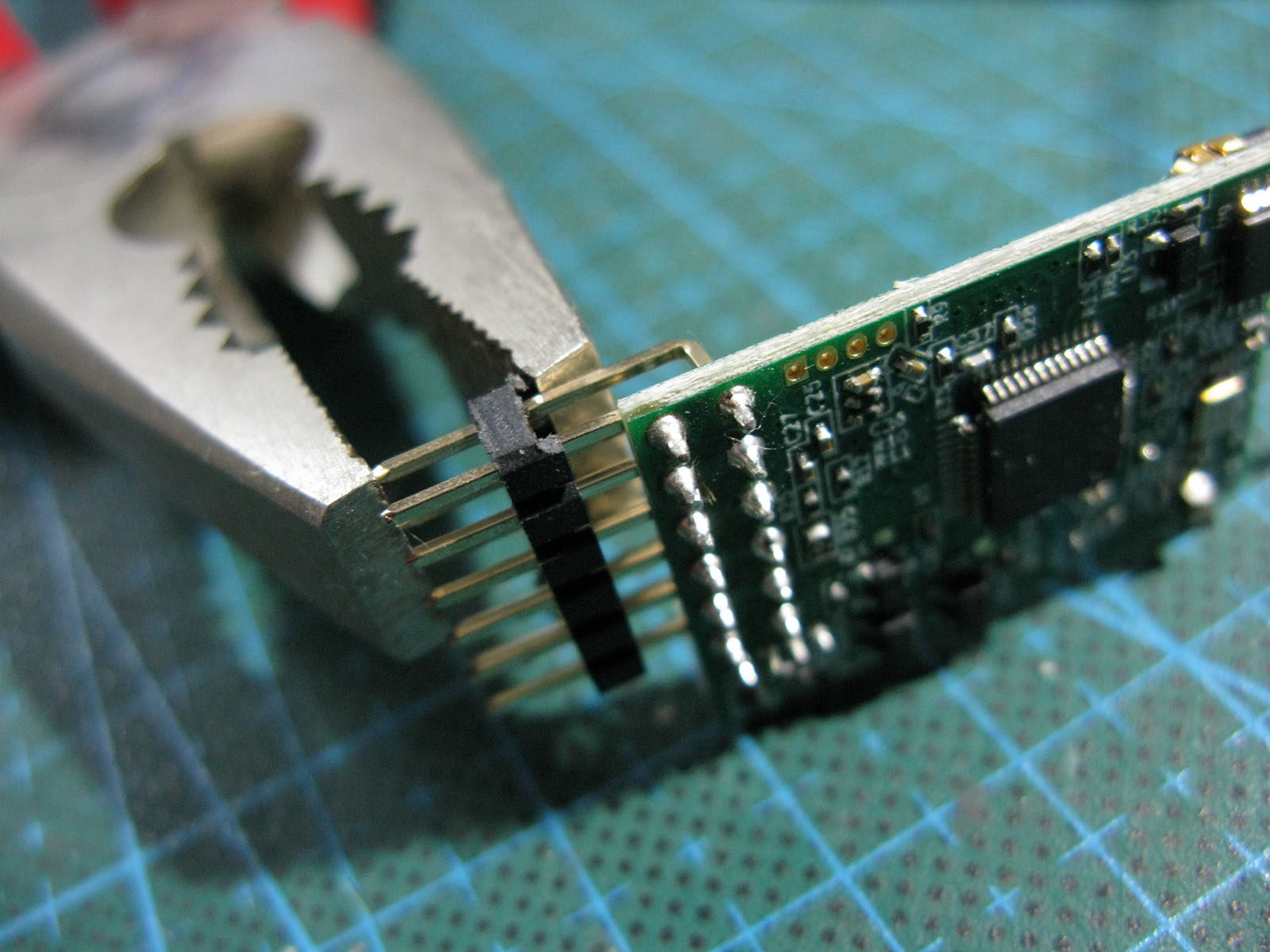
然后针脚都单独分离了就很简单了,用电烙铁一个一个针脚焊下来即可。
拆焊的时候不要太用力,不然会悲剧,仔细看图,我的S.BUS信号脚就有一条走线被带下来了T.T。好在焊回去测试了下没断。
取接收机的接线,量好长度,剪掉舵机头以后直接焊上接收机。这部分其实就已经完成了。去掉针脚直接焊又减轻了重量又减少了突出机身的面积。也不必担心插针的接触不良/脱落等问题了。
接下来是电压回传问题。机身自己有蜂鸣器是没错,但X9D+和X4R-SB既然有回传功能没有理由不去用它。回传有两种方式:
- 配置飞控里的Telemetry
飞控将电压信息发送给接收机,由接收机发回给遥控器。缺点是首先需要在飞控板上额外引出一条线到接收机,其次因为F1的飞控只有2个串行接口且都被使用了(一个USB,一个S.BUS接收机),要用回传还需要启用软串口,这会给CPU带来额外的计算负担。在F1板+2k刷新率下,我希望CPU能尽量少忙些事。
- 直接使用接收机的模拟输入口
这个方式其实在之前一篇文章里已有说过。我们可以选择用一个FrSky的分压模块直接读取电池电压,或者DIY一个小模块来读取。这个方式无论软件还是硬件上都不用动飞控一根手指头,是此机上比较理想的方式。
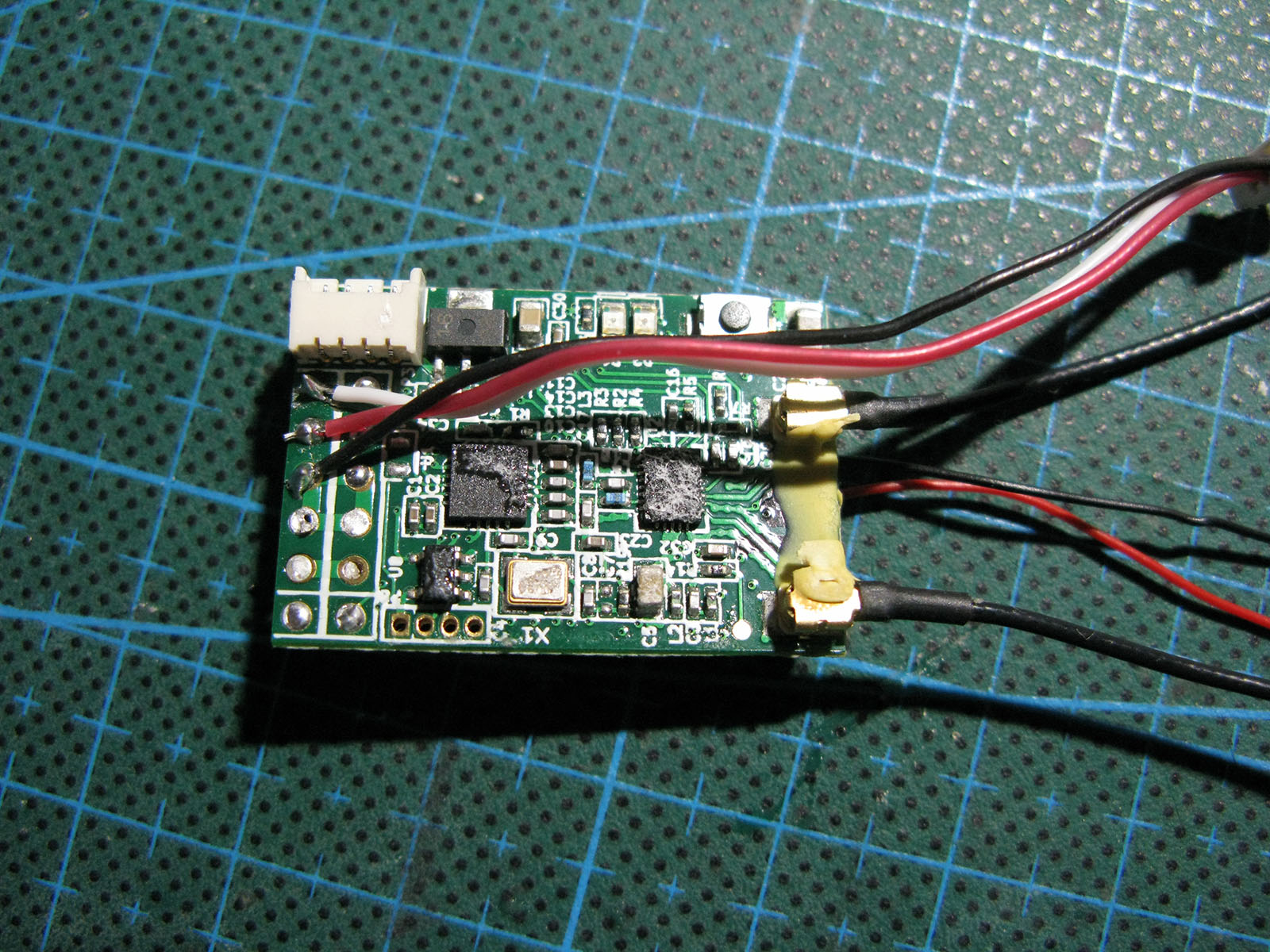
然而之前是用普通的元件DIY的,在这家小机上出于体积和重量的考虑,我用了贴片元件来做。
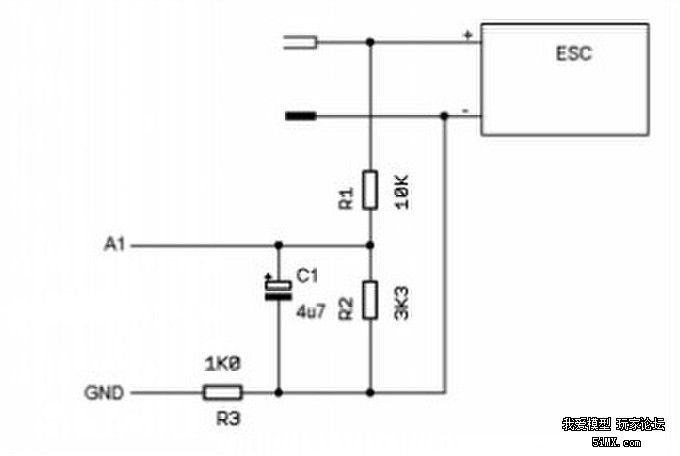
重新贴一下电路图,对这个还不清楚的建议先看一下原文。
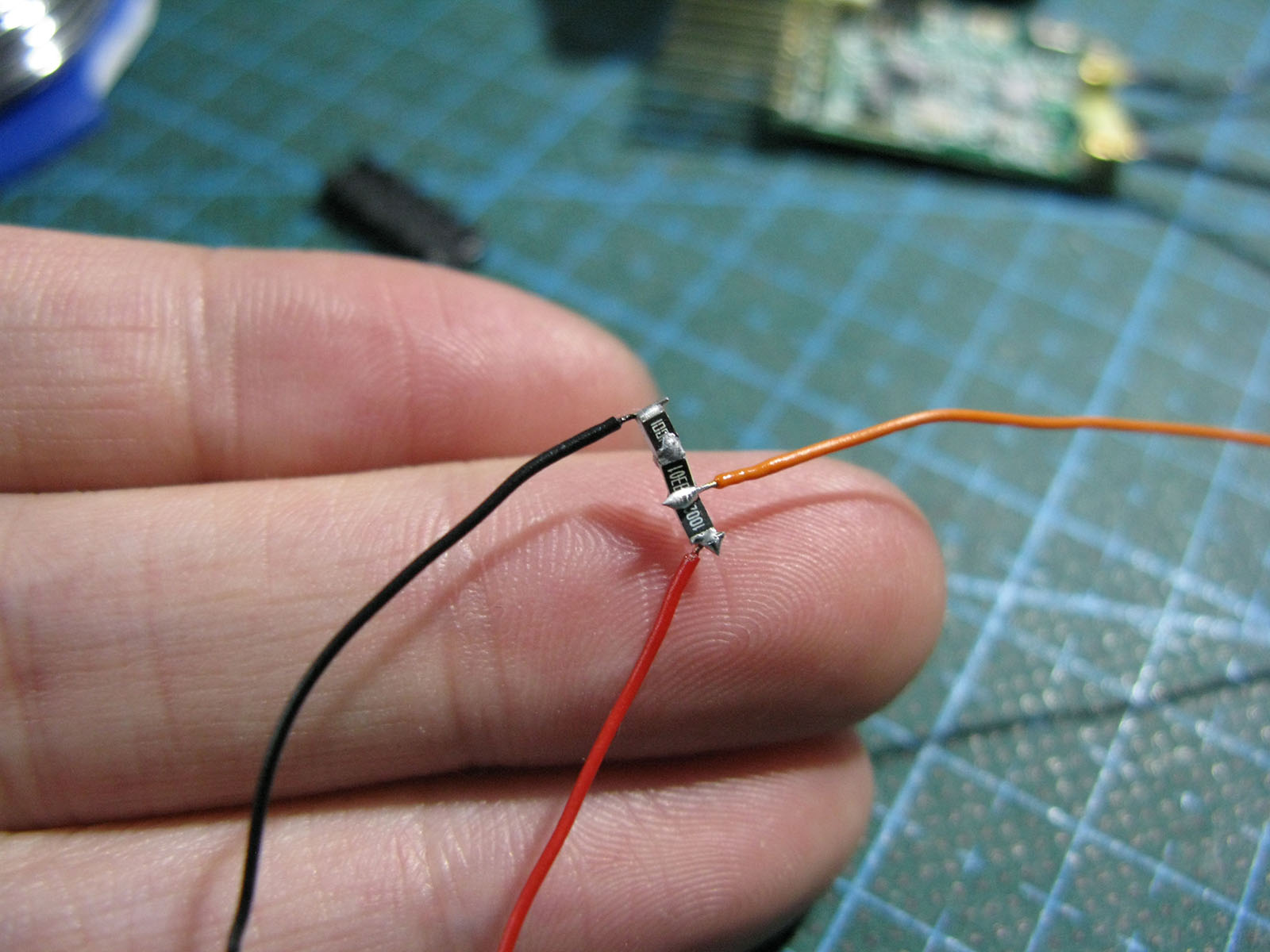
三个电阻串联焊好,4.7uf的电容焊在了中间那颗3.3K电阻的背面与它并联。
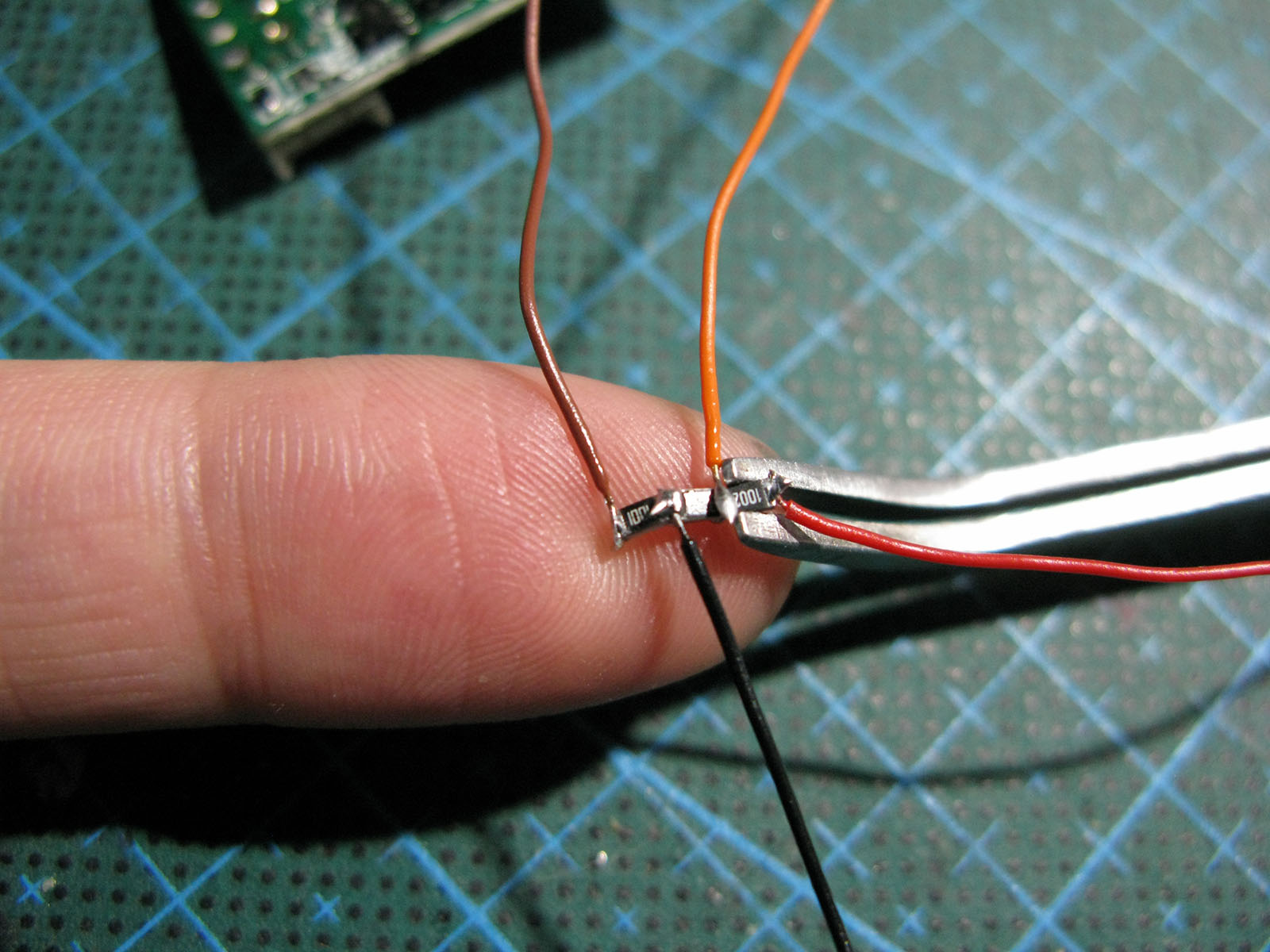
焊好4根引线。其中两根接电池正负极,两根接接收机的模拟输入口。
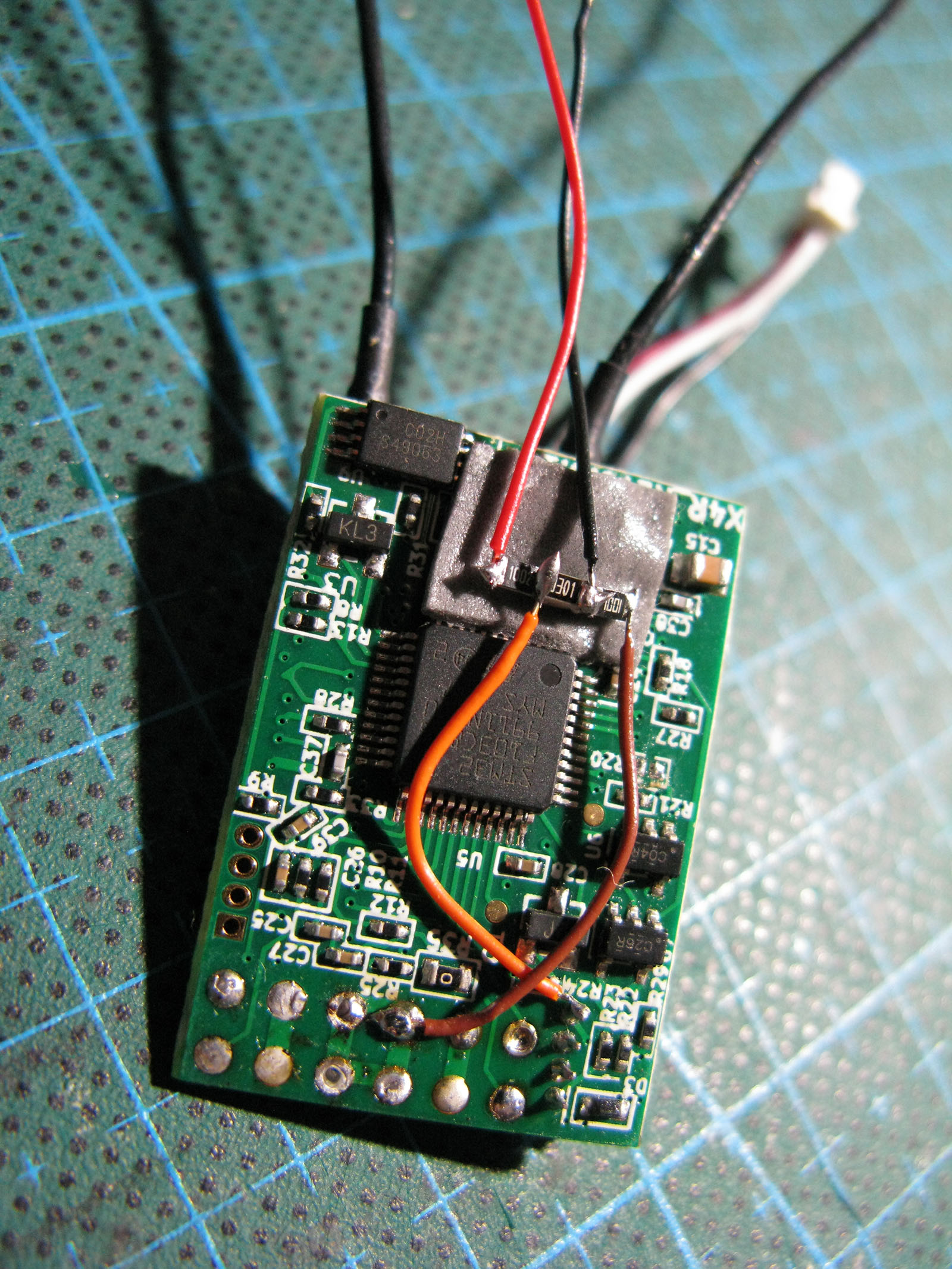
用一块3M双面胶把这个“模块”固定在接收机上,电压检测的线直接焊在了模拟输入口A1的背面针脚上,这样连小接头也省了。负极的话,A1旁边那个负极针脚太小又夹在中间,为了焊接安全,我把负极焊在了一个舵机口的负极上。
电池端比较好办,直接焊在图示位置的电调引脚上。
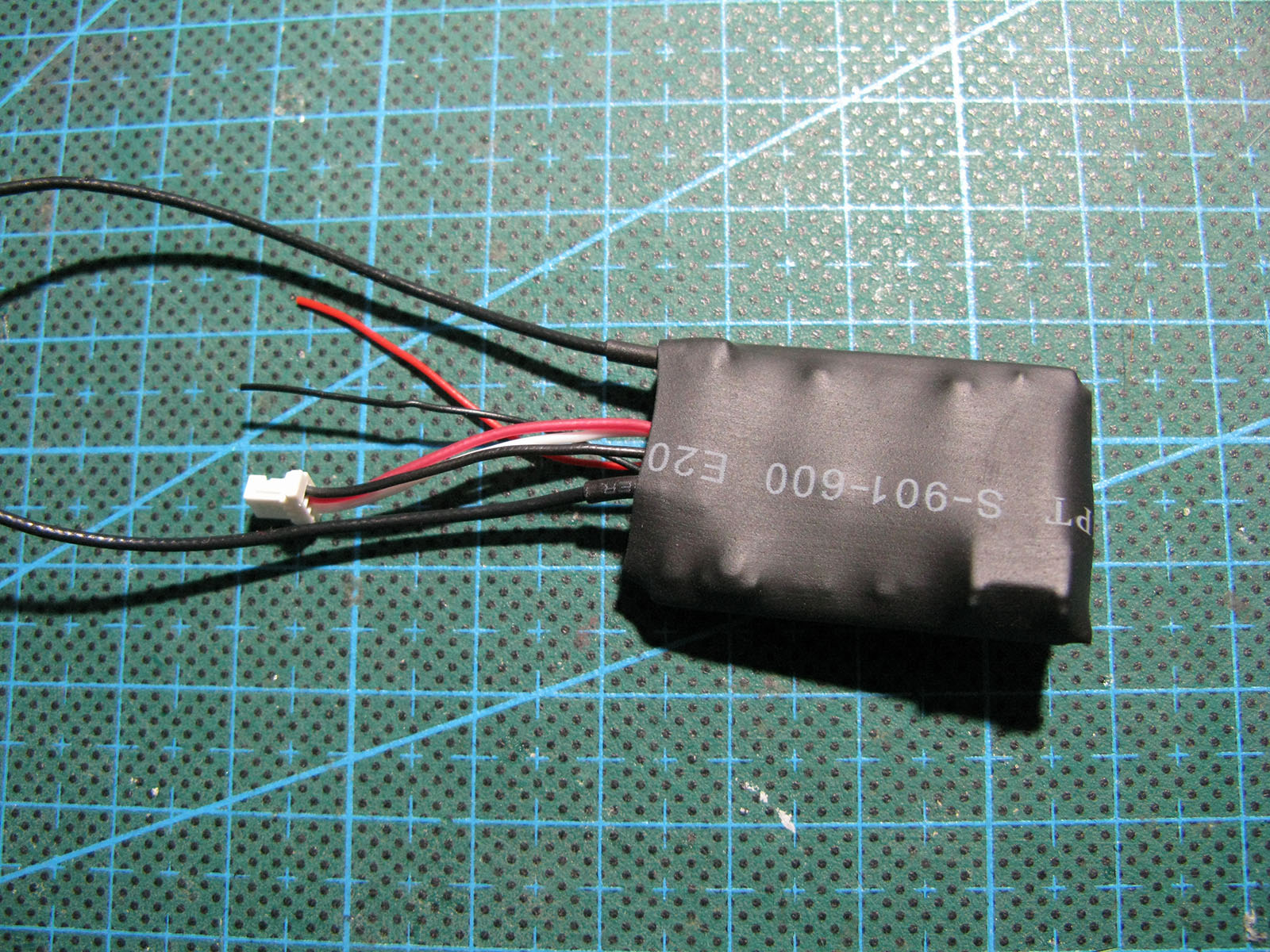
包上热缩管,贴一块双面胶就可干净利落固定在机架尾部,且有回传电压啦!~
BetaFlight 2.8.1 的确是有明显不同的丝滑手感。TL130H1的表现也令人满意,静如处子、动如脱兔。小空间的穿越,大幅度的快速翻滚都毫无问题。更小的体积和更轻的重量飞起来心理压力都小了。CMOS摄像头在光照充足的条件下也表现不错。整个儿试飞非常愉快!满油门爬升有抖动,可能因为刷新率调到了2K,PID还需要微调(原厂CF固件设置的刷新率是1K),或者开一点TPA。要说不足的话,玩到后面天色暗一点以后,CMOS摄像头的宽容度短板就暴露了出来,明暗对比强烈的画面里暗处几乎是一片黑看不清了。以及几次小炸鸡以后,天线成这样了。
整体上我很喜欢这个小家伙。干净整洁颜值高。各部件搭配均衡,性能上也一点也不差。麻雀虽小五脏俱全。摄像头角度可调,OneShot 125加持的BlHeli电调,300mw图传等都让它在功能上也不输大的穿越机。而更迷你的体积更轻的重量让它对场地的适应性更强。相对来说危险性也较低(最安全/最危险的仍然是你自己!)。综合各种因素,我个人认为它可以作为一台理想的练习机。我自己应该会更多地飞它,只有在想带Runcam录像的时候才飞大四轴了。
- 轻薄小巧干净干练。
- 低重心设计。
- 300mw图传。
- 摄像头角度可调。
- 支持S.BUS接收机。
- 图传有金属外壳,利于散热。
- 一体化碳纤机架牢固。
- 预调参。免安装。到手5分钟就可飞。
- 飞行表现优良。
- 立柱挡住了USB口到底是怎么回事!
- 图传天线是线性的而非圆极化天线。安置位置不甚理想且脆弱易损。更换麻烦。
- CMOS摄像头对光照环境适应性不强。
- 电调不支持Active Breaking
- 螺旋桨易损,多备几套。

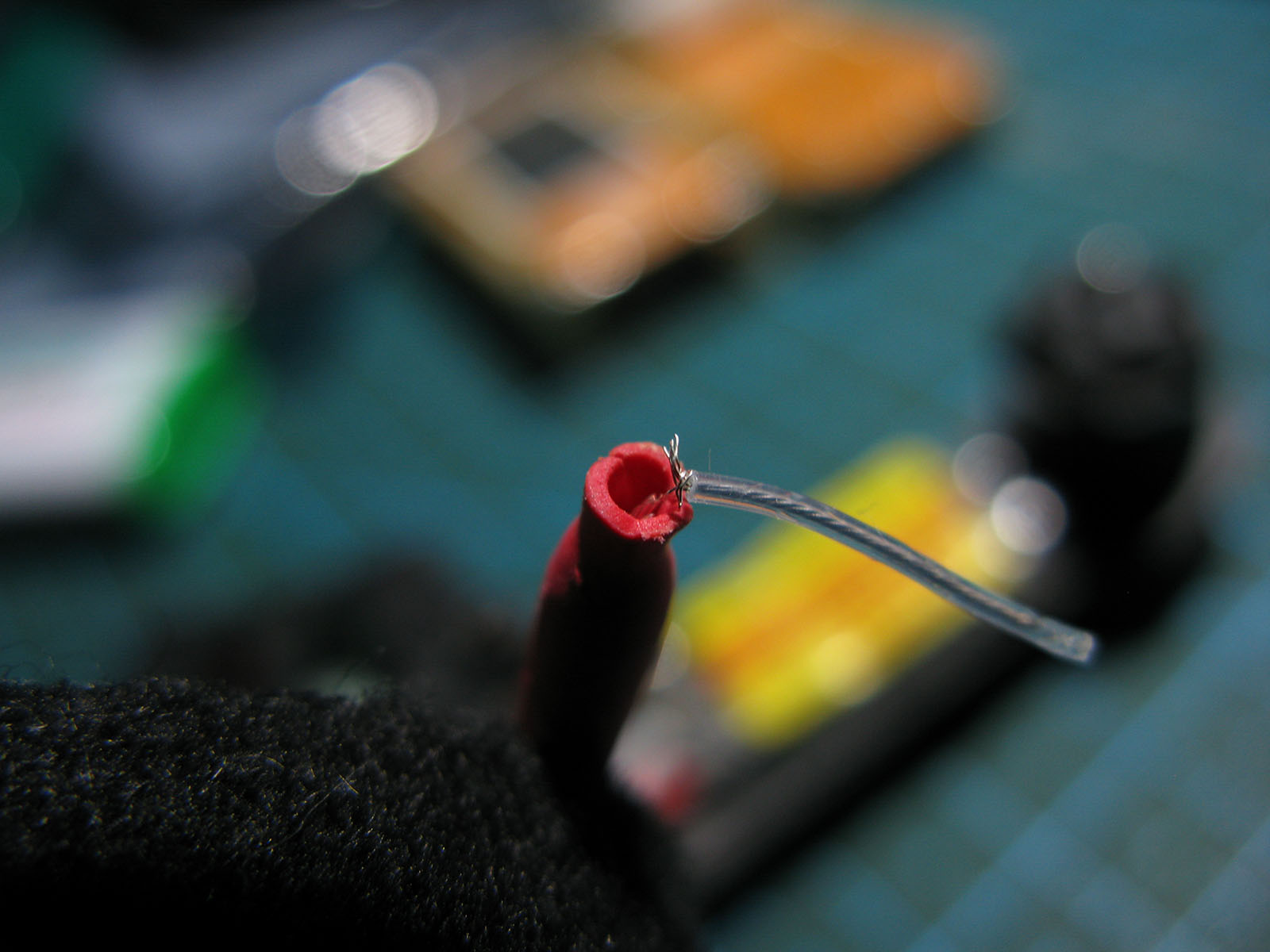
所以天线还是断了。拆开上盖看一下,天线没有用任何接头,直接焊在图传上,并且焊点用热熔胶加固。
拆开焊下坏掉的天线并没有什么难度,原样焊上新的天线,照样用热熔胶加固一下焊点后装回。
然后来加固一下露出的真正的天线部分,也就是露出铜管的末端那1厘米多的部分。其实办法也非常简单,套上2层热缩管就好。
热缩管并不会影响图传信号,且这样可显著降低炸鸡给天线带来的损伤(一开始就应该这么干了!)。这个办法唯一的缺点是如果天线受损甚至断了会不易发现。定期检查吧。
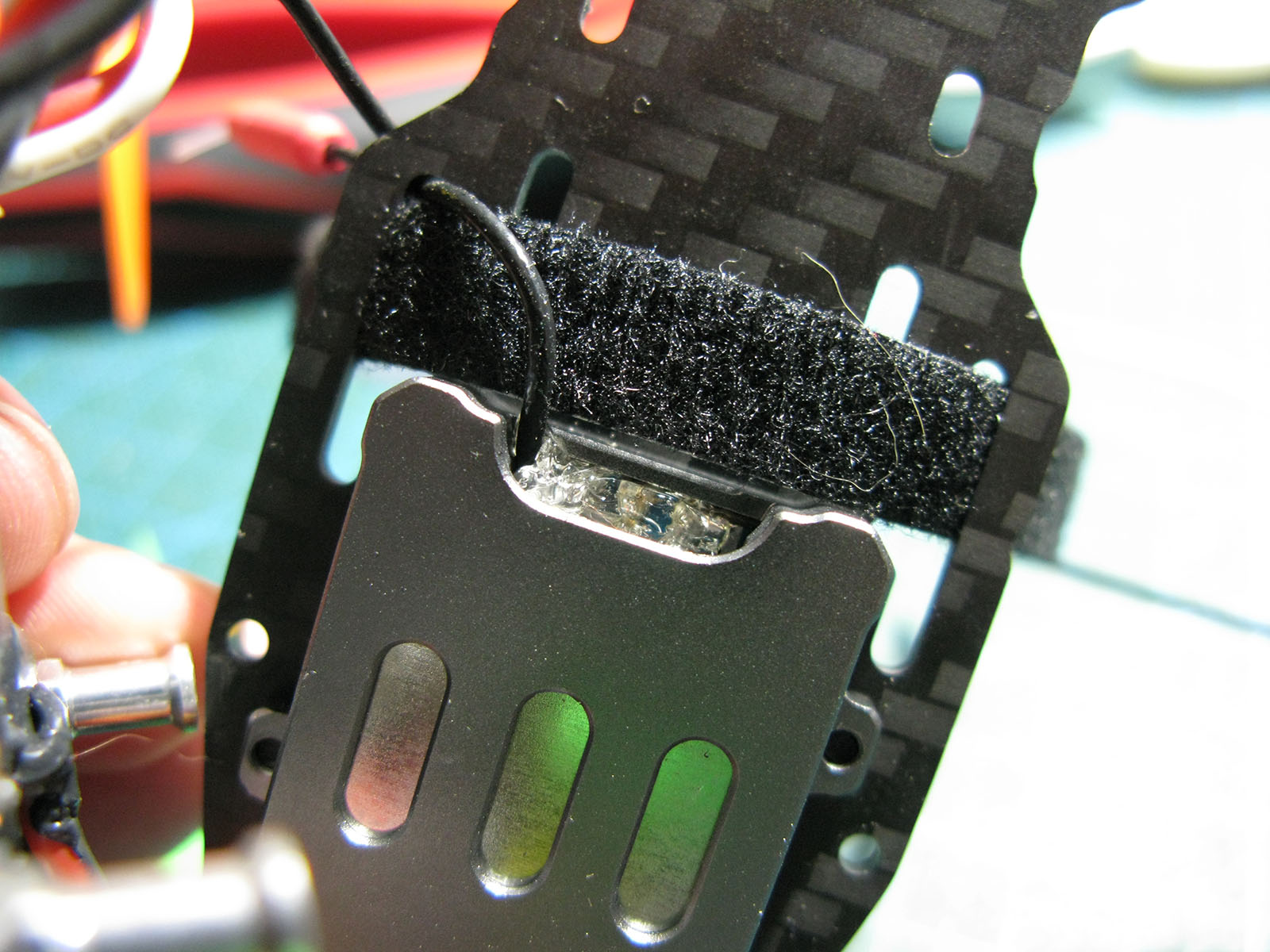
另一个细节是,天线穿过上层板的部分,最好也加固一下。因为在日常的动作和飞行的震动时,碳纤板的直角边缘对于薄薄的天线外皮是有类似切割的效果的,时间长了外皮会被磨穿。相对比较好的办法是在那个部分也套上一层热缩管。然而对于拿到手时已经装好的天线(或者像我这次换天线时忘记了的……),要拆下来显得有些没必要。那么还是用热熔胶吧。
稍微掰开天线一点,让热熔胶流到天线和碳纤板中间填充好就好。这样避免磨损还有一点点防拉扯效果。
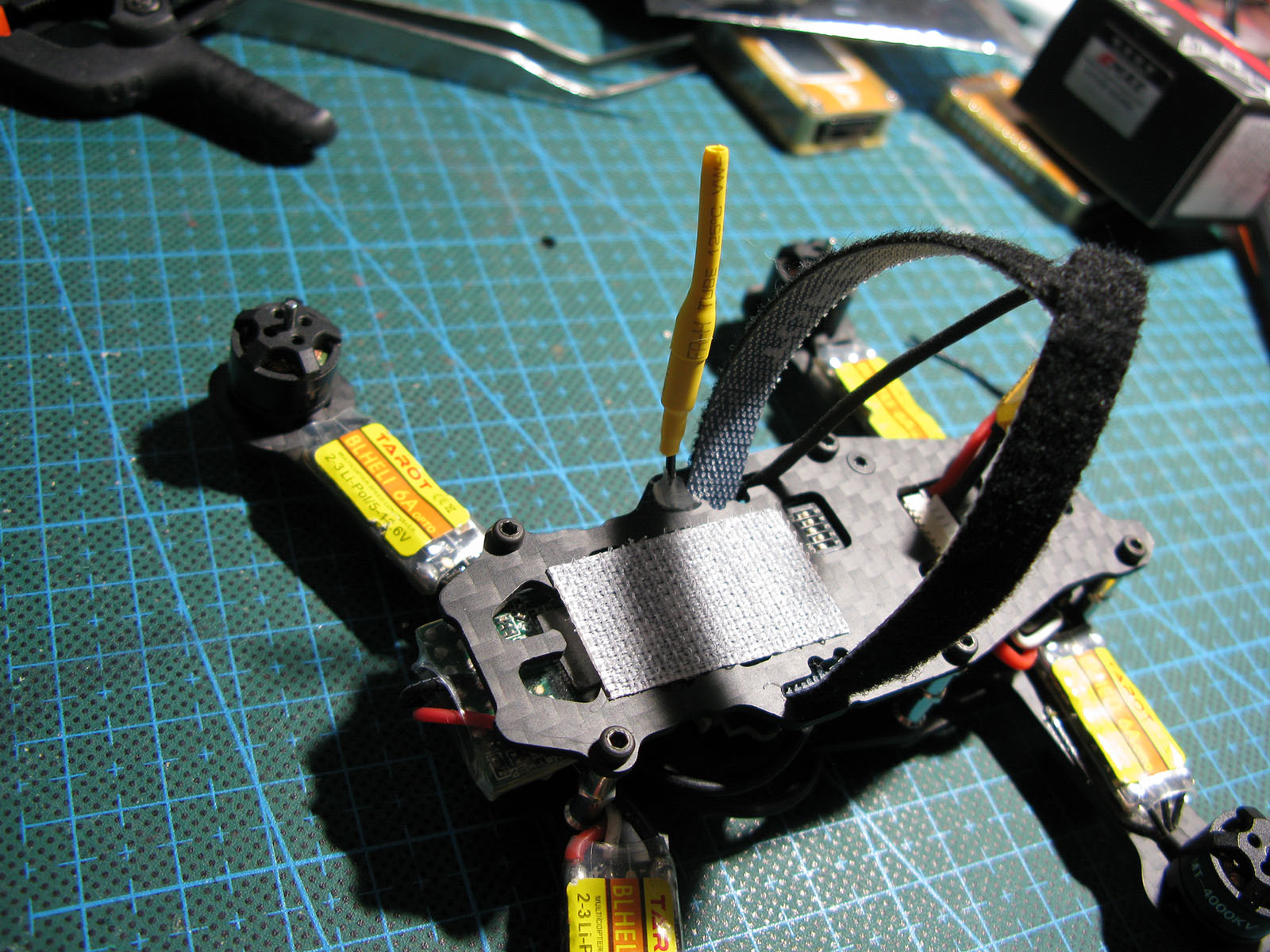
最后就是扎带绑电池时,一起把天线绑进去,避免炸鸡时被螺旋桨切到。
强烈建议先做好这个加固再飞,可以省去日后不少麻烦。






暂无评论